

Article Figures & Data
Figures
- FIGURE 1
Overview of the applied coordinate systems
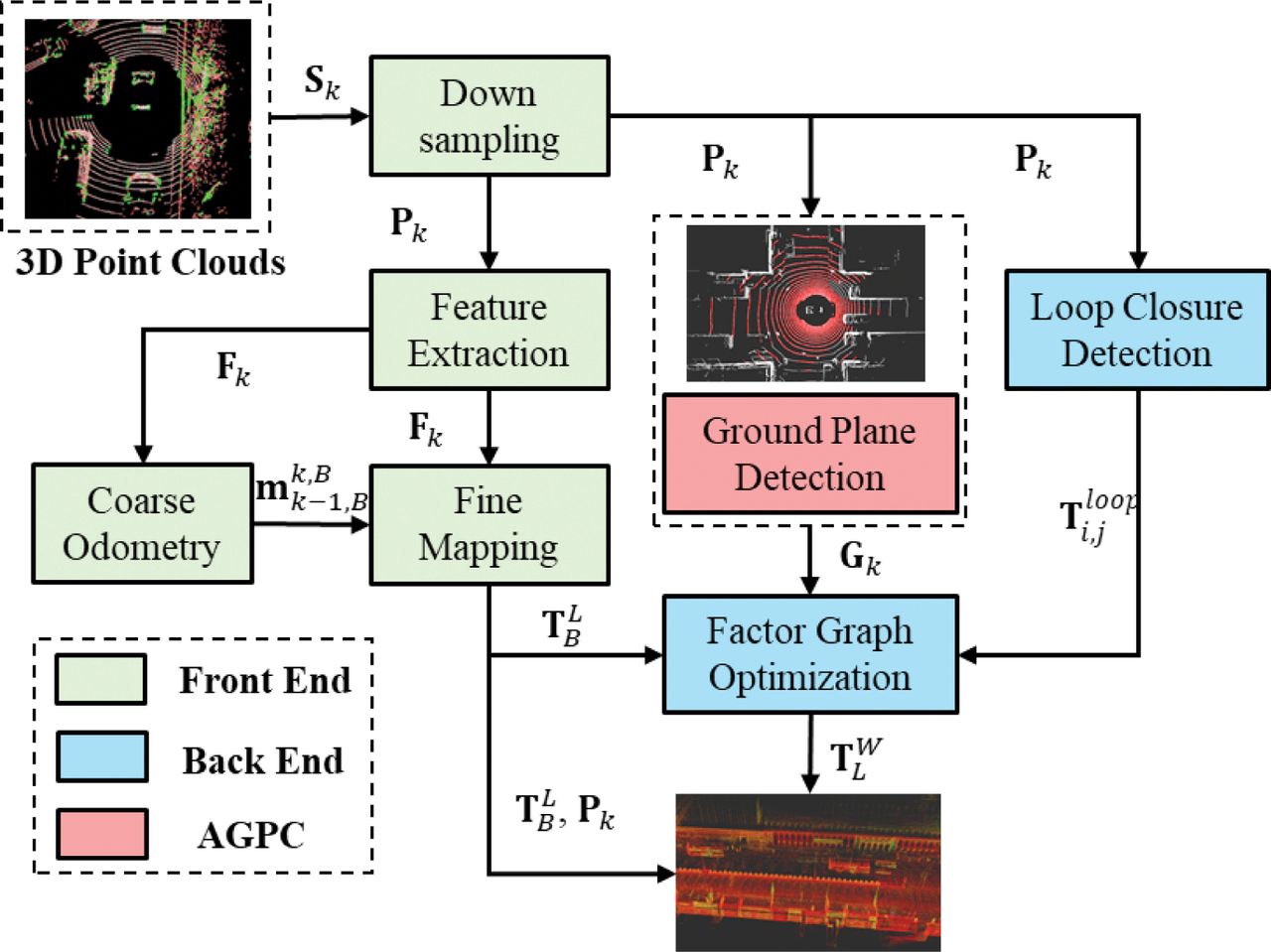
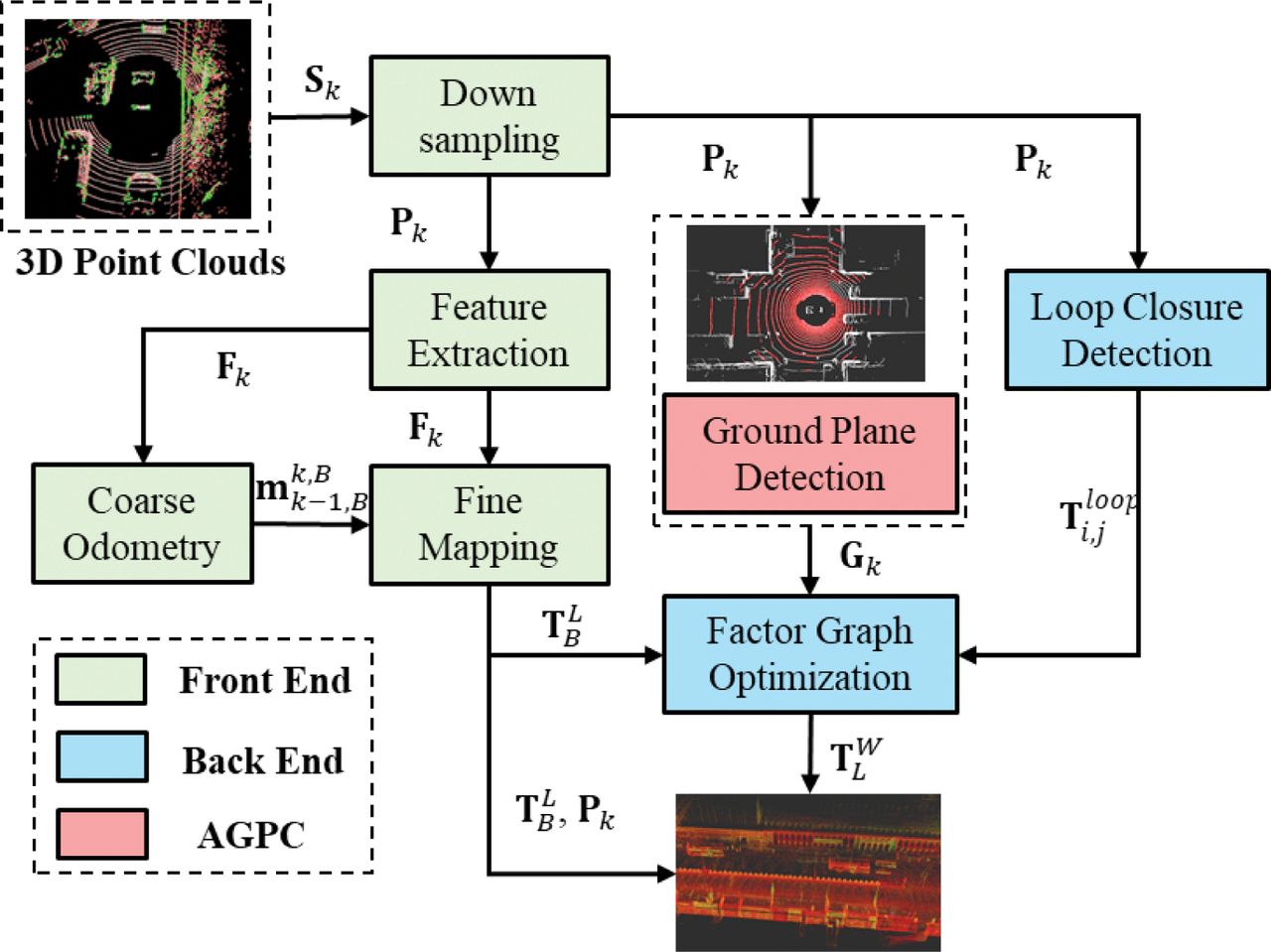
- FIGURE 2
Overview of the proposed AGPC-SLAM; the input is the 3D point cloud from 3D lidar. The outputs include the points map and pose estimation of vehicular trajectory.
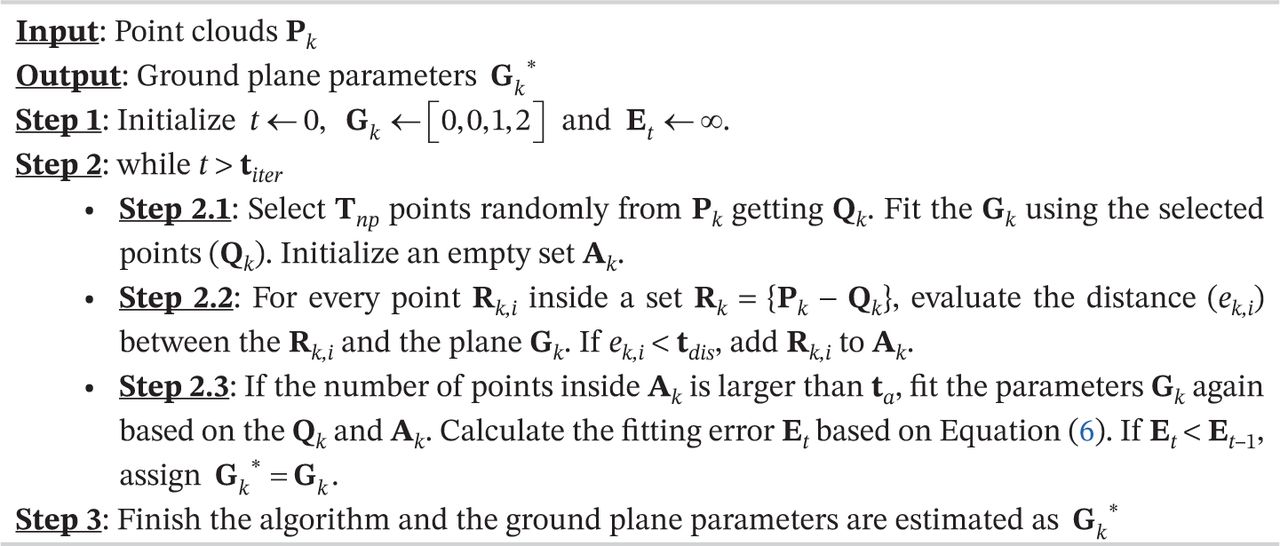
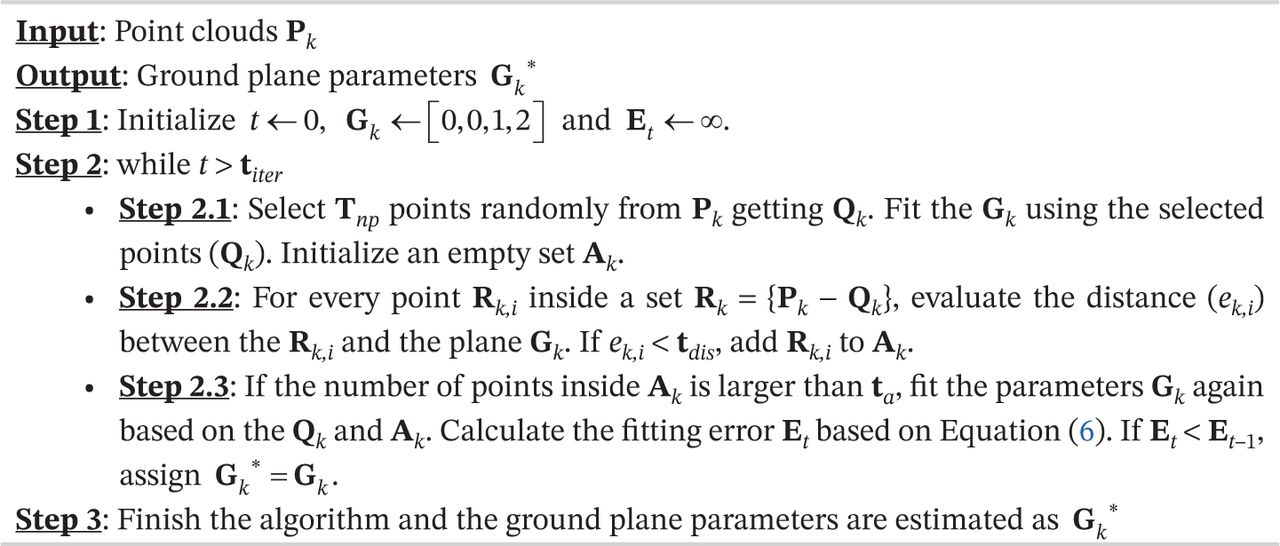
- ALGORITHM 1
Ground Plane Detection Using RANSAC
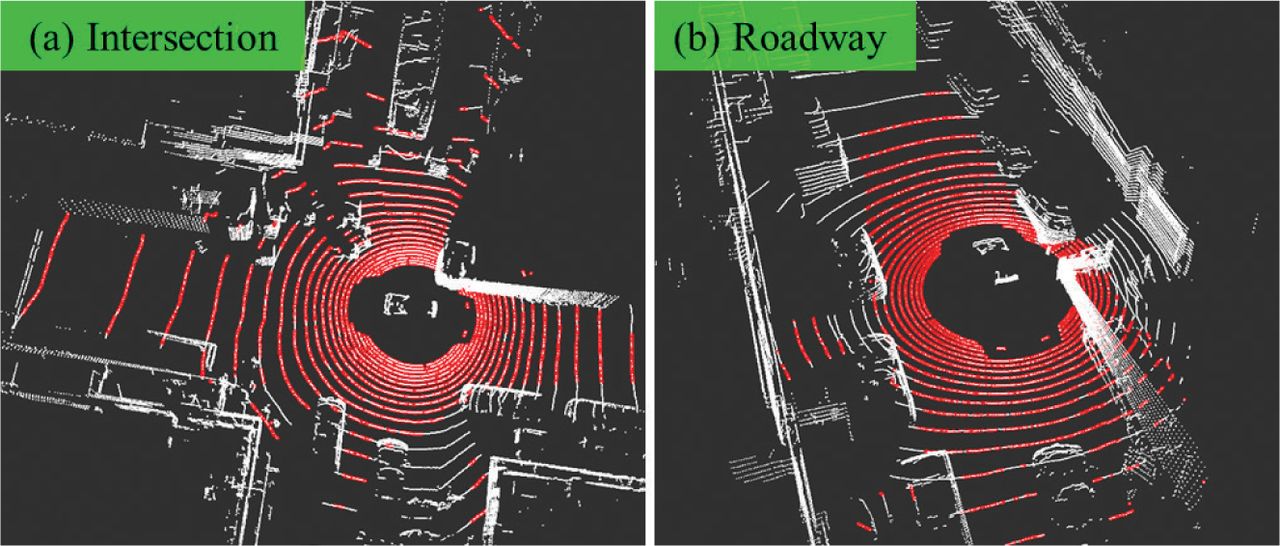
- FIGURE 3
Illustration of ground detection using Algorithm 1 (the white points represent the raw point cloud from 3D lidar and the red points denote the detected ground point cloud).
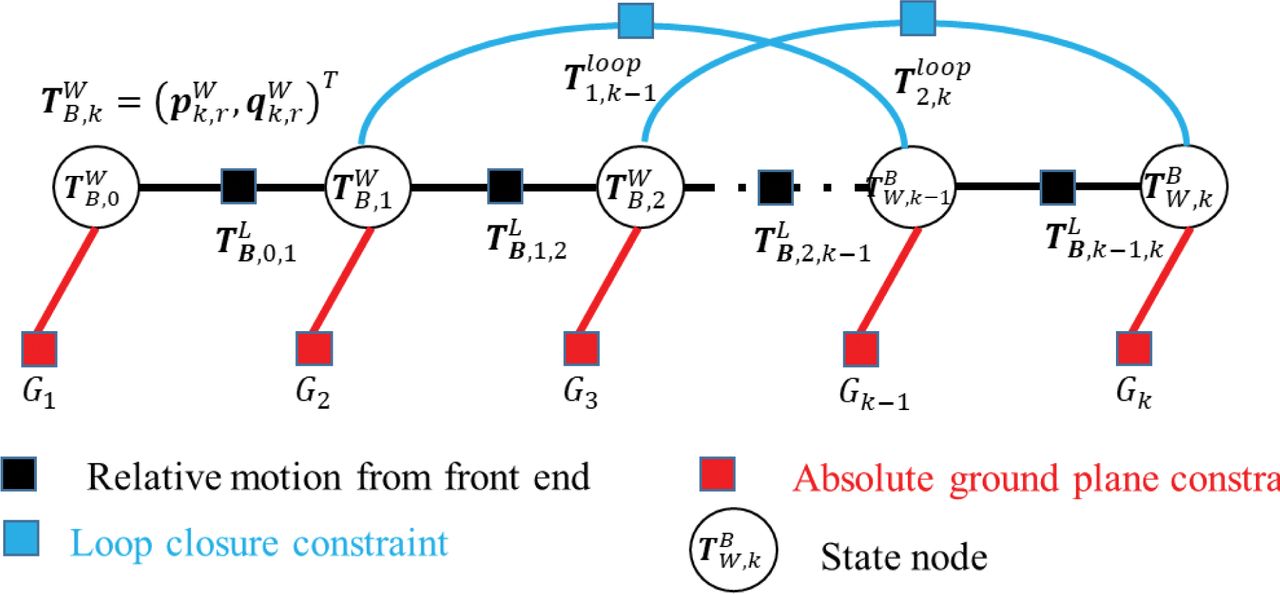
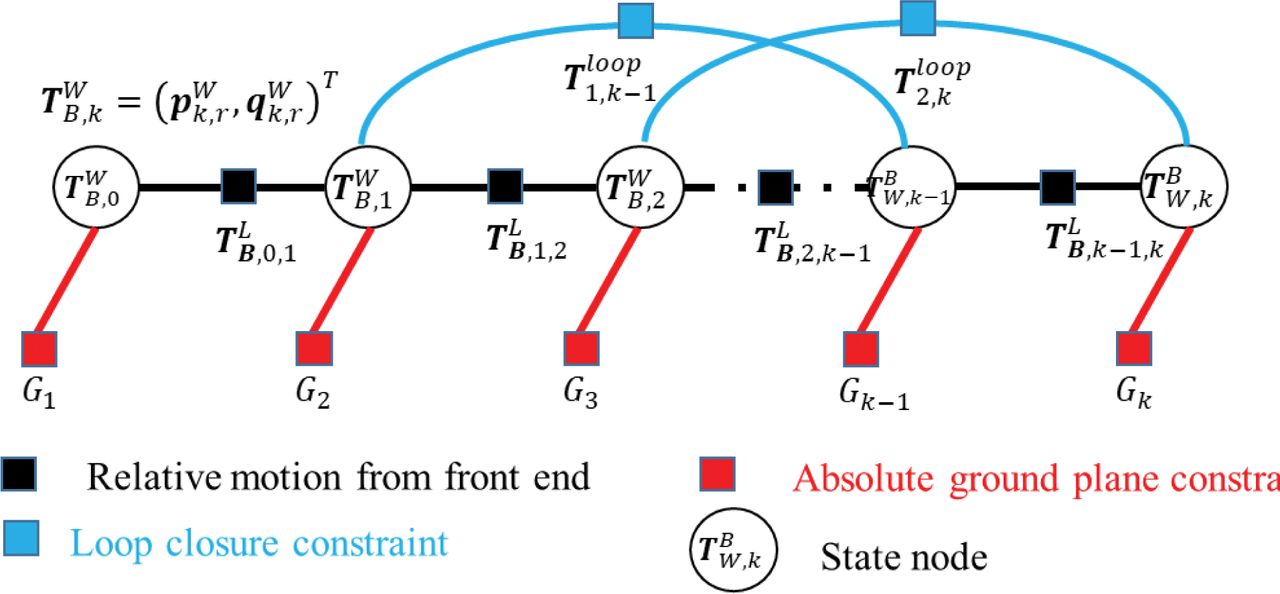
- FIGURE 4
Graph structure of the proposed AGPC-SLAM
- FIGURE 5
(a) Data collection vehicle with all the sensors installed in a compact sensor kit; (b) tested scenarios; and (c) trajectory with a driving distance of 4.2 km
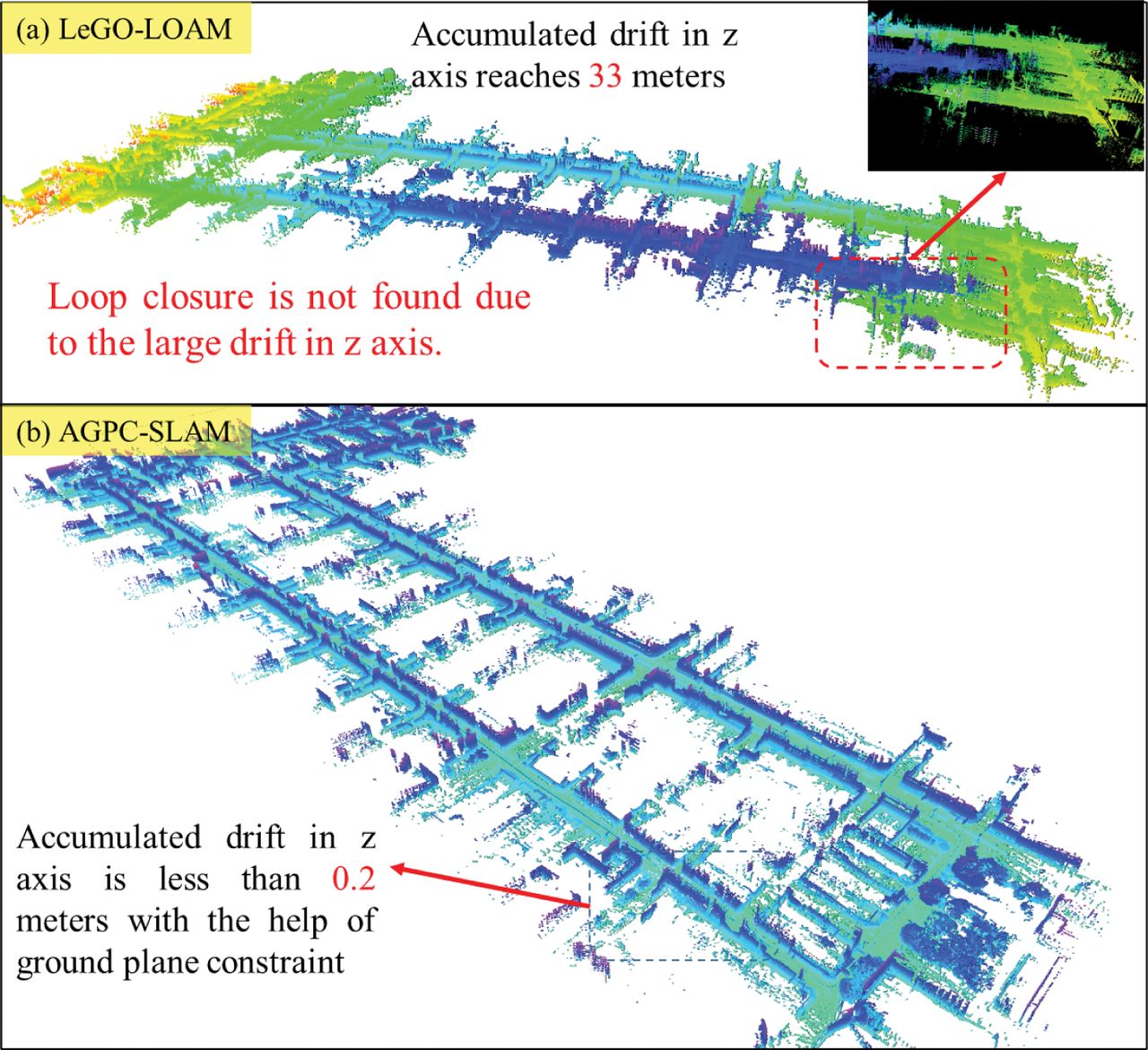
- FIGURE 6
Illustration of the map generated by the two methods; the color of the map is annotated by the value of the z-axis (height) of each point.
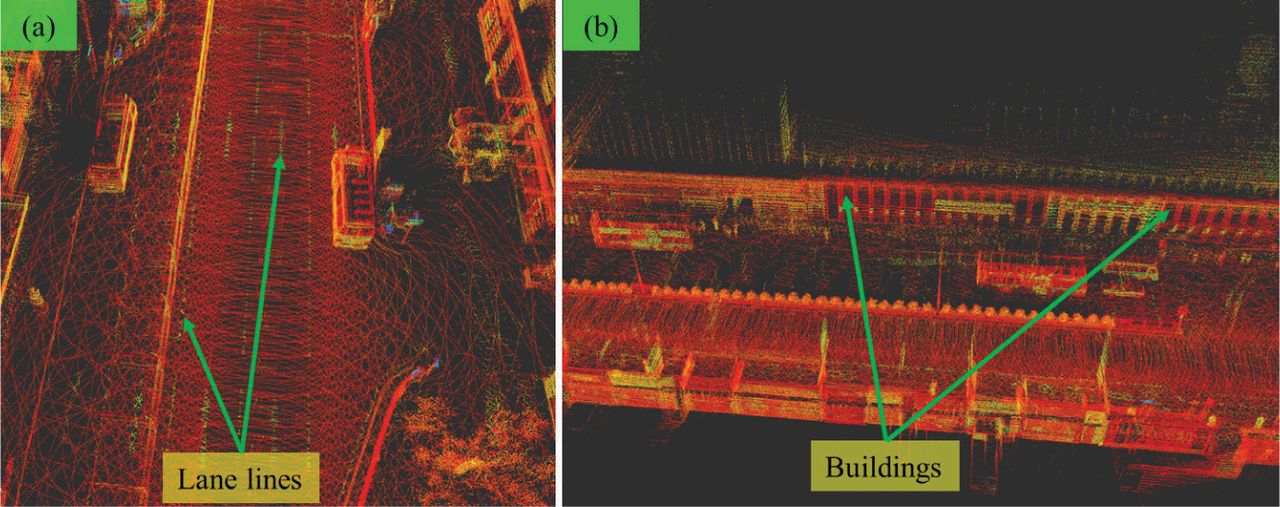
- FIGURE 7
Details of the generated map with reflectivity using the proposed AGPC-SLAM in Location 1
- FIGURE 8
(a) Environmental condition at the start point (blue shaded circle); (b) the scene with partial ramp road (red shaded area)
- FIGURE 9
Trajectories of the LeGO-LOAM (red curve), AGPC-SLAM (blue curve), and ground truth trajectory (black curve)
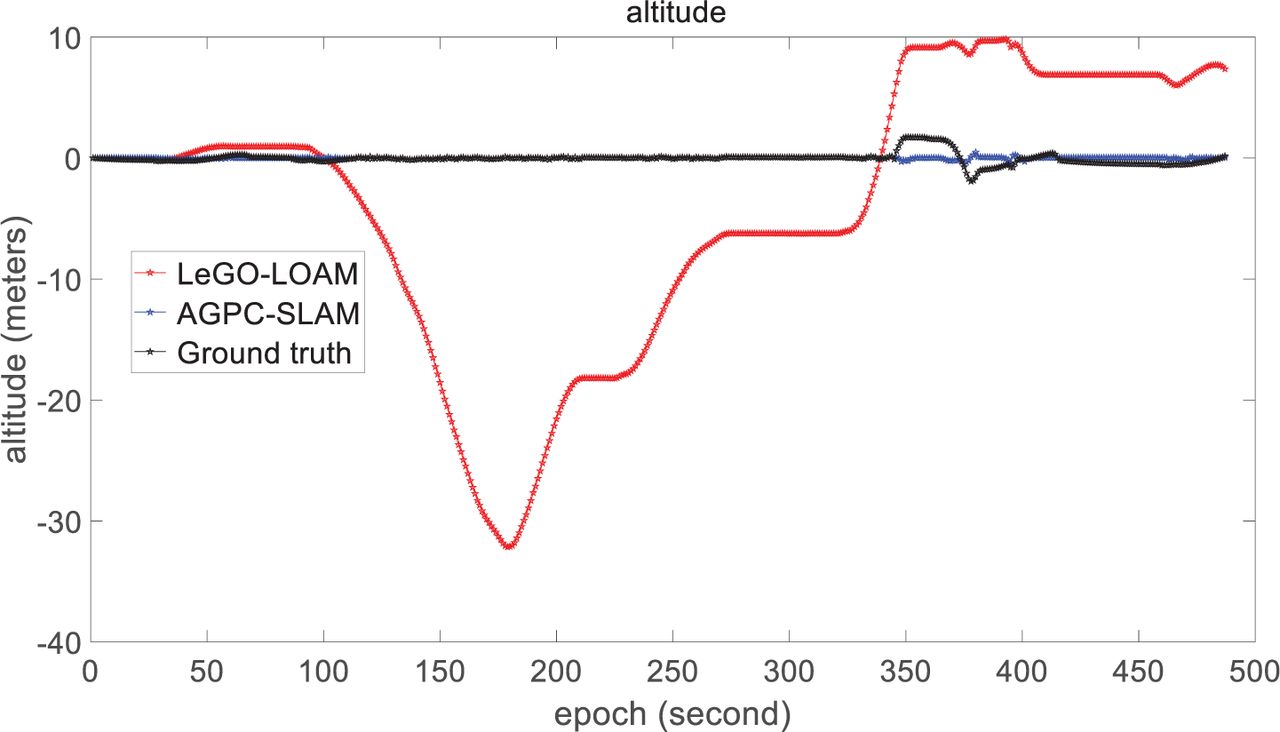
- FIGURE 10
Altitude of the LeGO-LOAM (red curve), AGPC-SLAM (blue curve), and ground truth trajectory (black curve) during the testing area with the ramp road
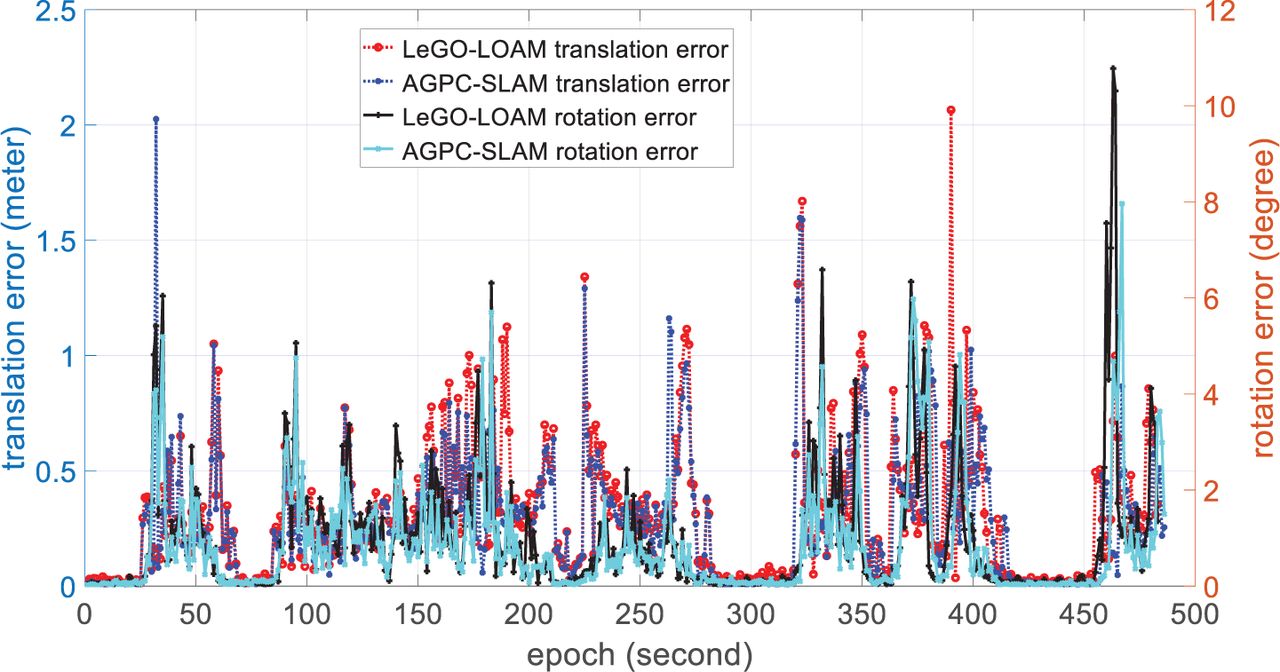
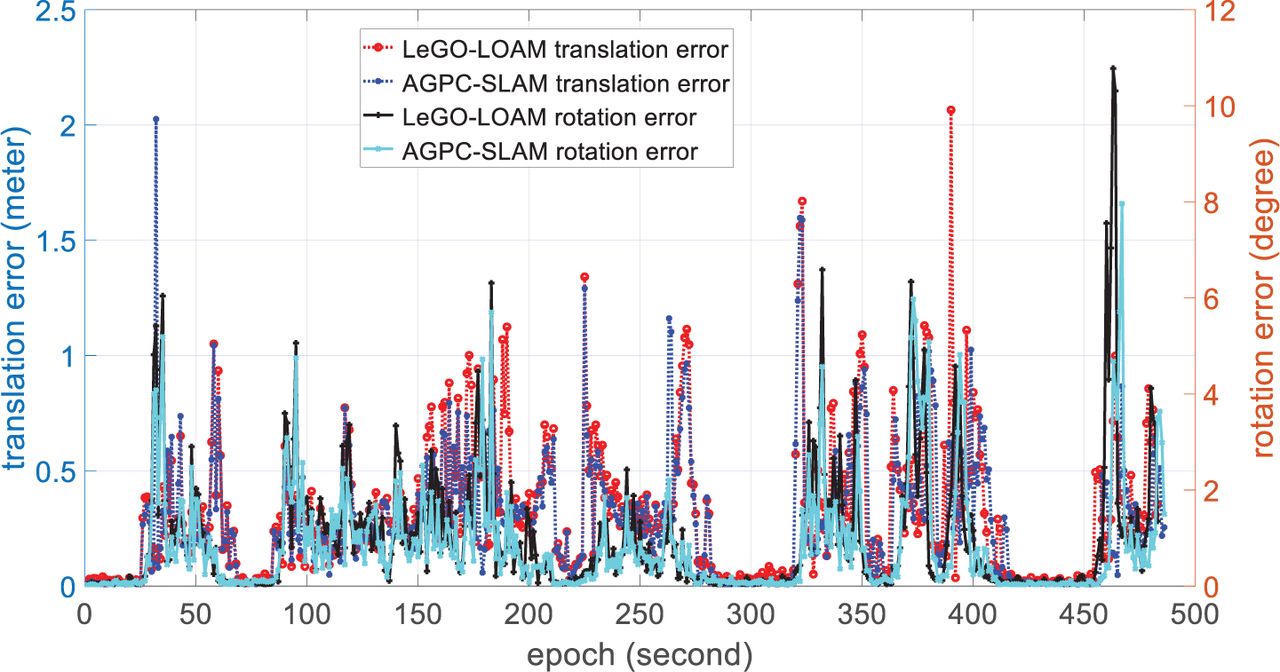
- FIGURE 11
Relative translation and rotation errors for LeGO-LOAM and the proposed AGPC-SLAM, respectively
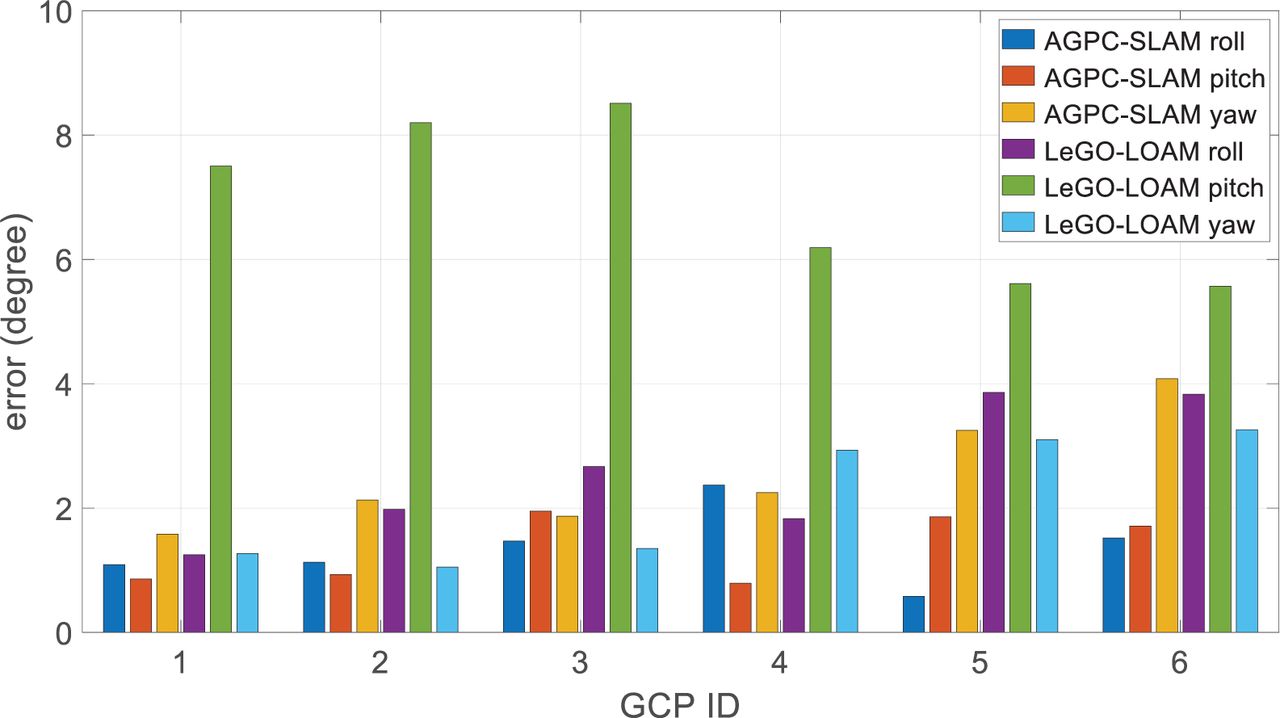
- FIGURE 12
Errors of the roll, pitch, and yaw angles for LeGO-LOAM and the proposed AGPC-SLAM (the x-axis denotes the ID of the GCPs from 1 to 6 and the y-axis denotes the errors)
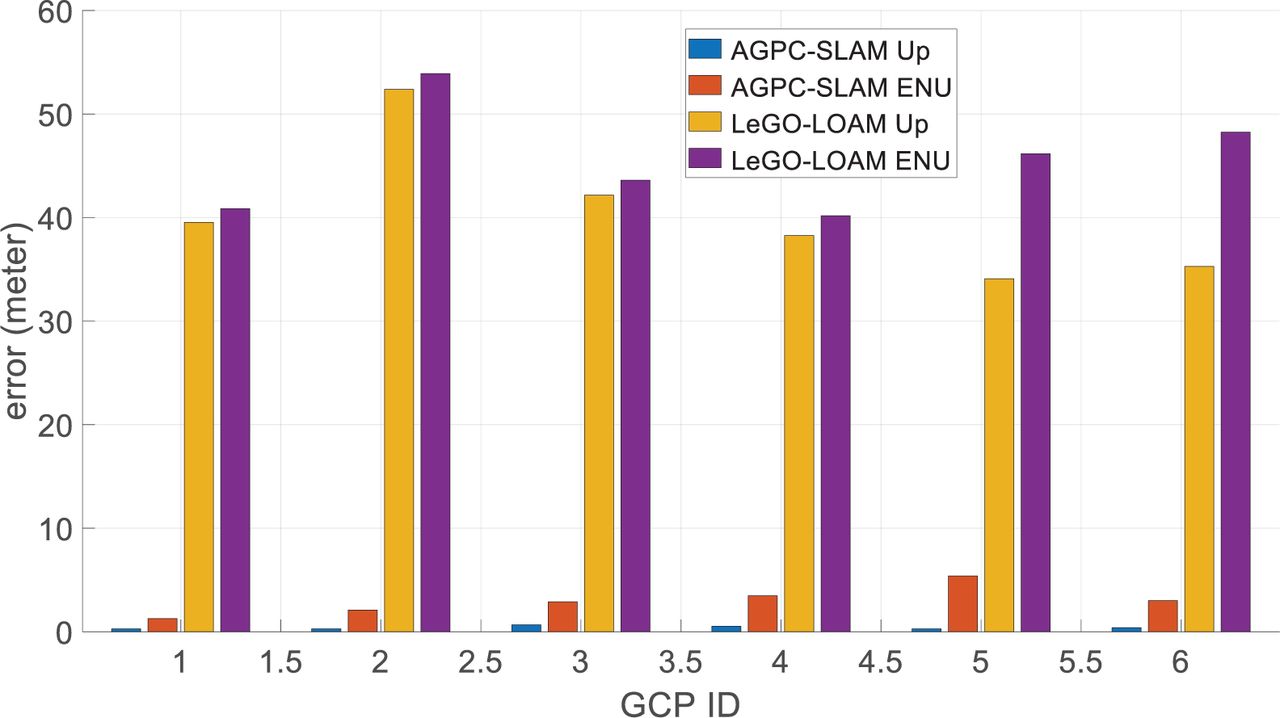
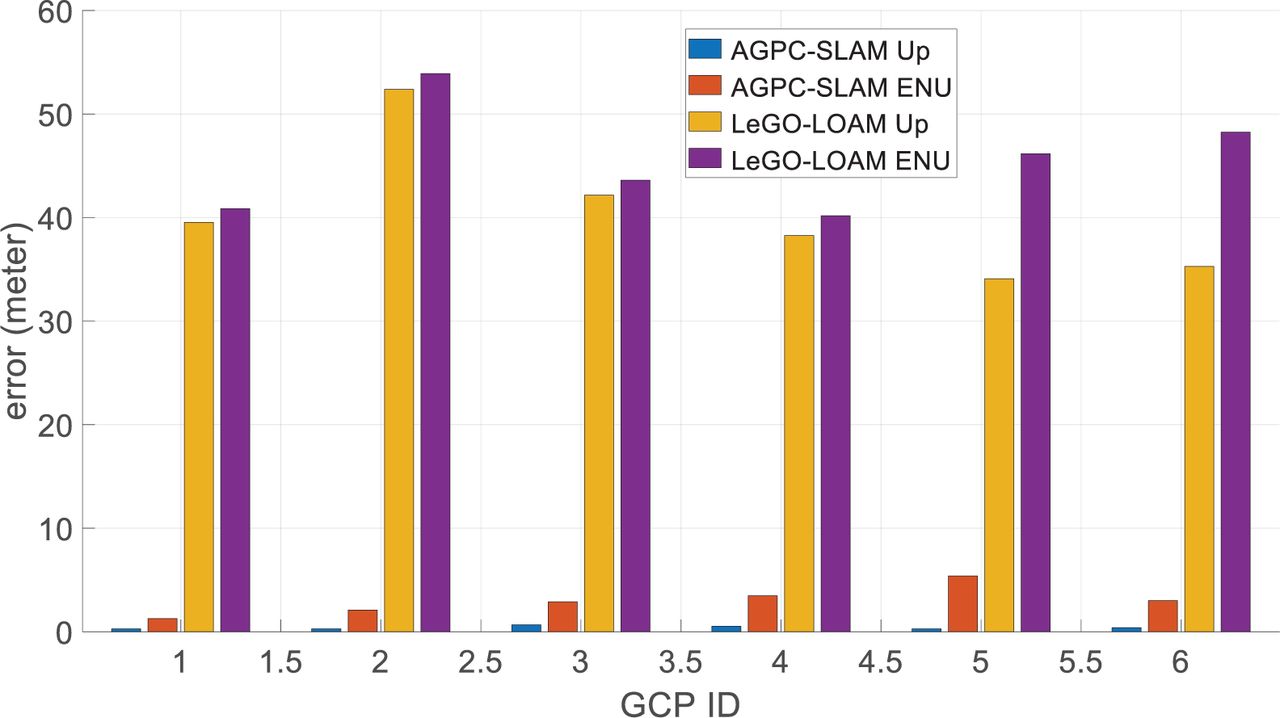
- FIGURE 13
Errors of the up (altitude) and ENU for LeGO-LOAM and the proposed AGPC-SLAM, respectively (the x-axis denotes the ID of the GCPs from 1 to 6 and the y-axis denotes the errors)







Tables
Para. tnp tdis ta titer tD Values 800 0.25 500 1000 20.0 Para. tF 
tc Values 0.80 10 I6×6 10 I6×6 4 I3×3 0.1 Method Roll Pitch Yaw Total % LeGO-LOAM (Shan & Englot, 2018) 2.57° 6.93° 2.16° 7.70° 0.18% AGPC-SLAM (proposed) 1.36° 1.35° 2.61° 3.24° 0.07% AGPC-SLAM (with loop closure) 1.29° 1.21° 1.53° 2.33° 0.056% Note: %: [Total]/[total driving distance]
Method East North Up ENU AE % LeGO-LOAM (Shan & Englot, 2018) 3.89m 11.58m 43.83m 45.49m 34.80m 1.08% AGPC-SLAM 1.39m 2.65m 0.41m 3.02m 1.89m 0.04% AGPC-SLAM (loop closure) 1.32m 2.36m 0.40m 2.73m 0.52m 0.065% Note: AE: accumulated absolute error. %: [ENU]/[total driving distance]
Method MEAN RMSE Altitude AE % LeGO-LOAM (Shan & Englot, 2018) (Translation) 0.33 m 0.46 m 7.36 m 8.92 m 0.42% AGPC-SLAM (Translation) 0.27 m 0.38 m 0.21 m 5.26 m 0.26% LeGO-LOAM (Shan & Englot, 2018; Rotation) 0.69° 1.22° 3.72° 0.19% AGPC-SLAM (Rotation) 0.58° 1.07° 1.87° 0.09% Method Trans. RMSE Rot. RMSE Altitude LeGO-LOAM (Shan & Englot, 2018; Loop closure) Loop Not Detected Loop Not Detected Loop Not Detected AGPC-SLAM (Loop closure) 0.43 m 0.64° 0.13 m










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Jump to section
Related Articles
Cited By...
- No citing articles found.