

Article Figures & Data
Figures
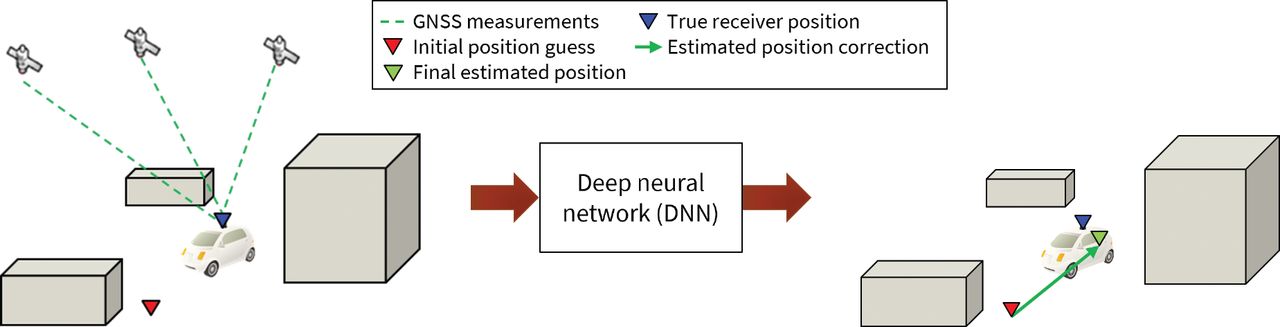
- FIGURE 1
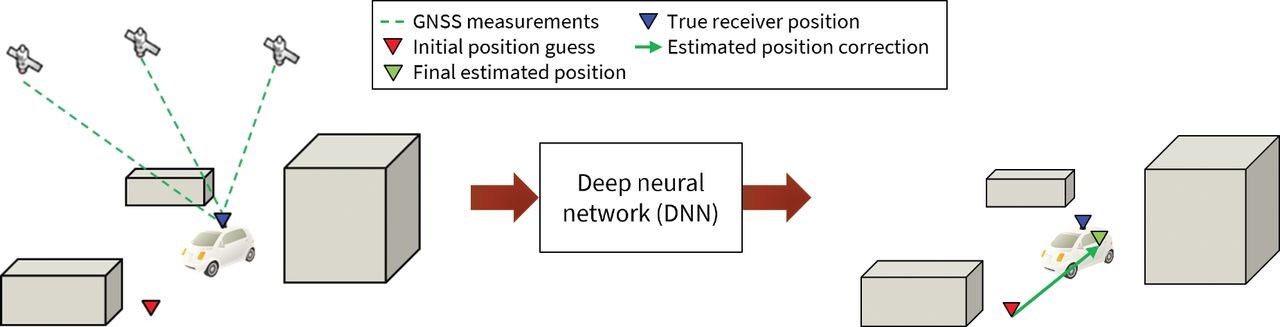
Our approach for applying deep learning for GNSS-based localization; given GNSS pseudorange measurements and satellite positions, our method uses a DNN to estimate position corrections to an initial position guess.
- FIGURE 2
View of the overall positioning pipeline; we process input GNSS pseudorange measurements and satellite positions using a DNN to estimate the correction to an initial position estimate.
- FIGURE 3
Architecture of the network consisting of the encoder, the aggregator, and the decoder; features from M satellites are processed by the network into a 3D position correction.
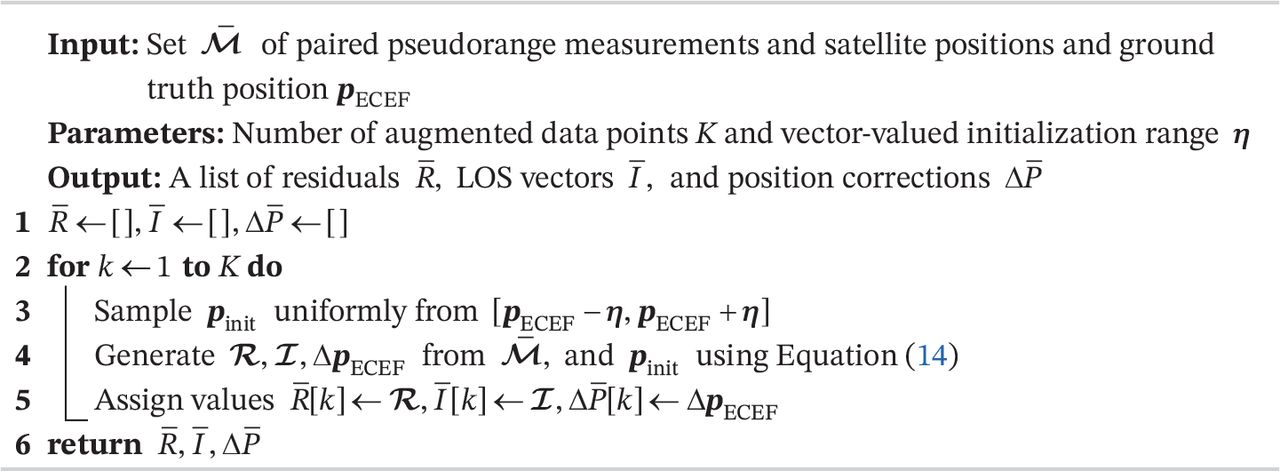
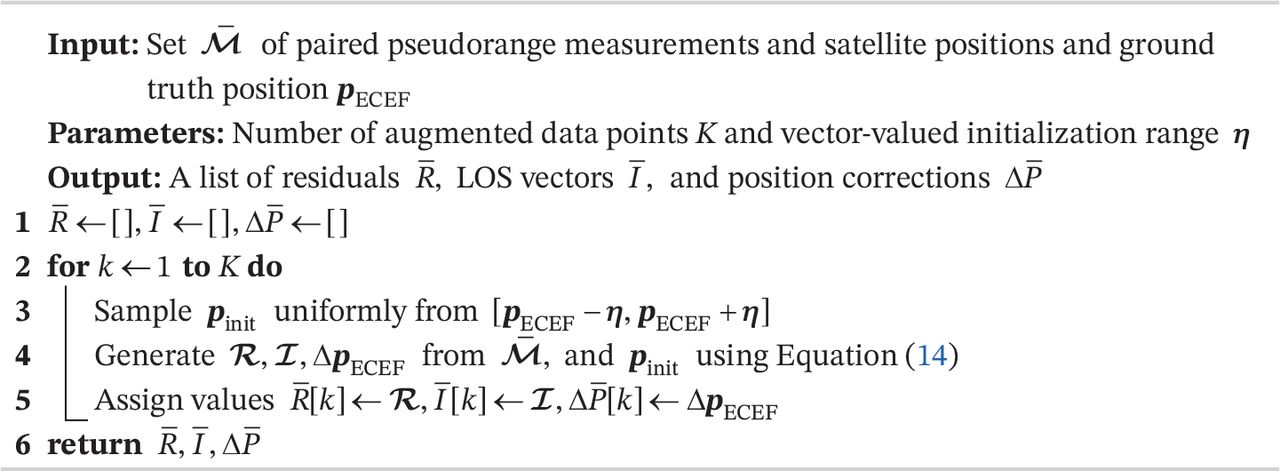
- ALGORITHM 1
Geometry-Based Data Augmentation
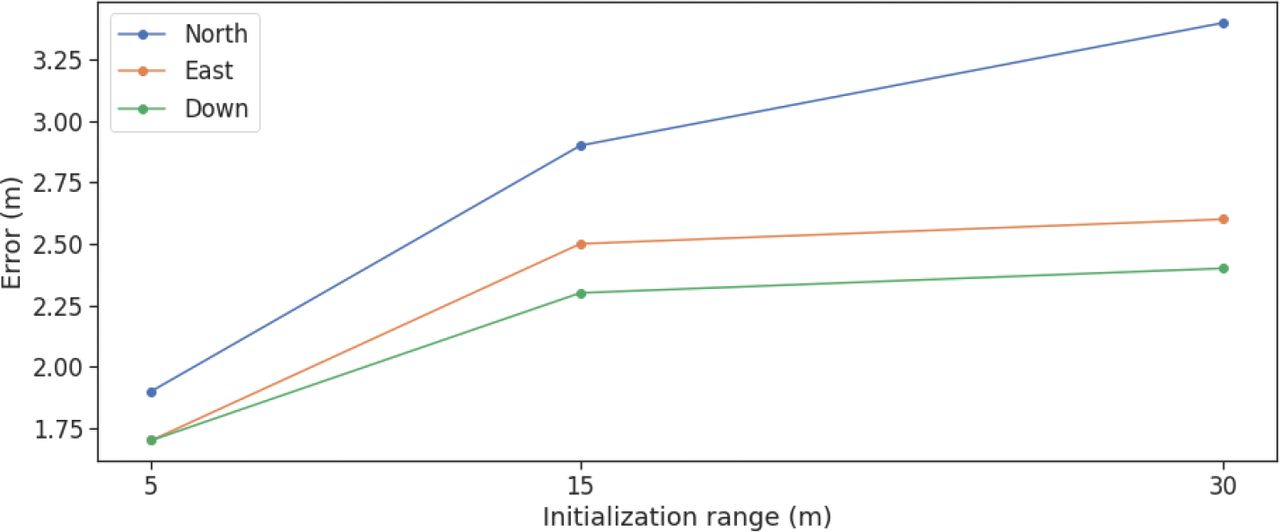
- FIGURE 4
Sensitivity analysis over various initialization ranges along the north, east, and down directions; the mean absolute error (MAE) in DNN-based position corrections increases when the initialization range increases.
- FIGURE 5
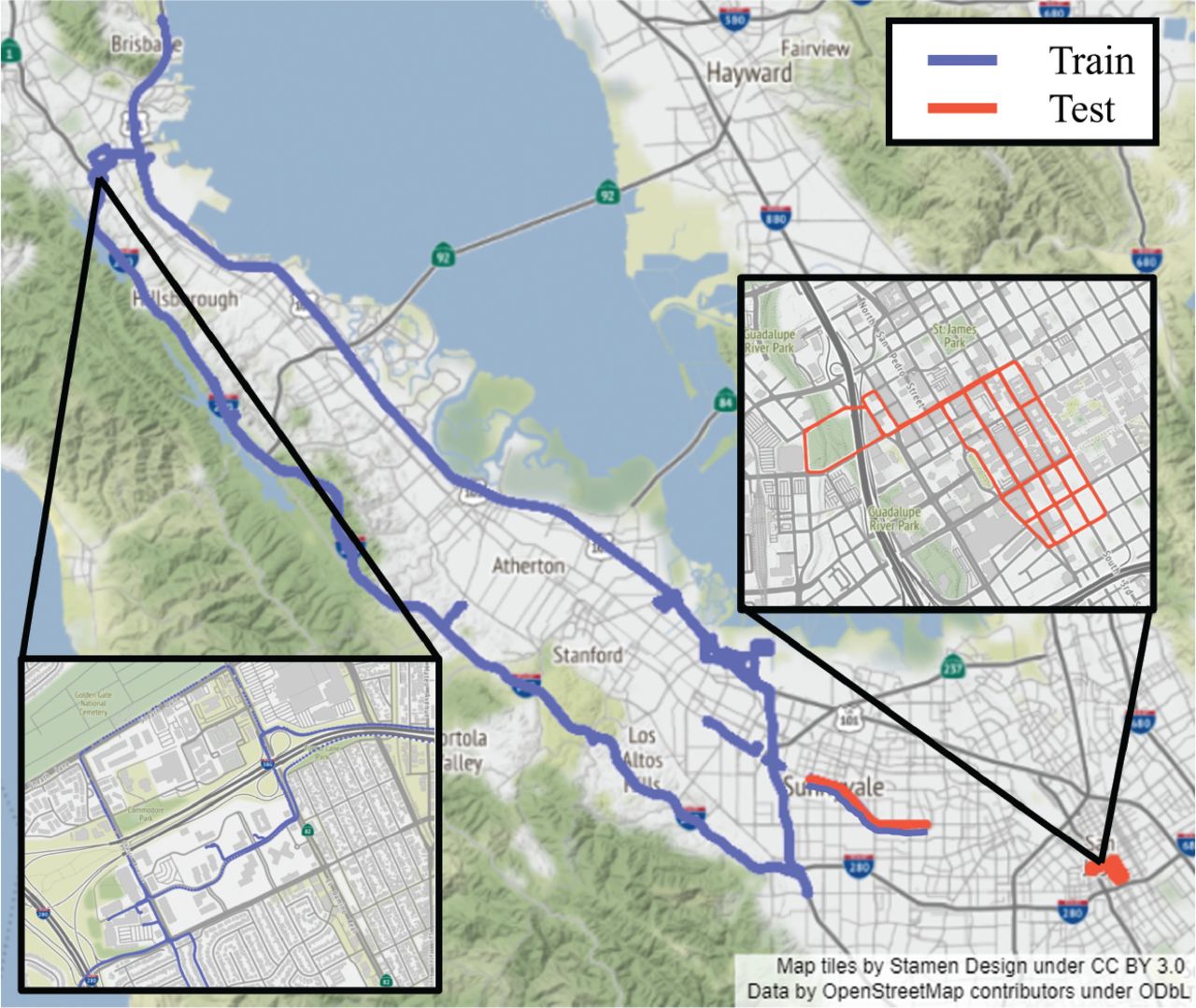
Traces from the Android Raw GNSS Measurements data set used for training/ validation (blue) and testing (red)
- FIGURE 7
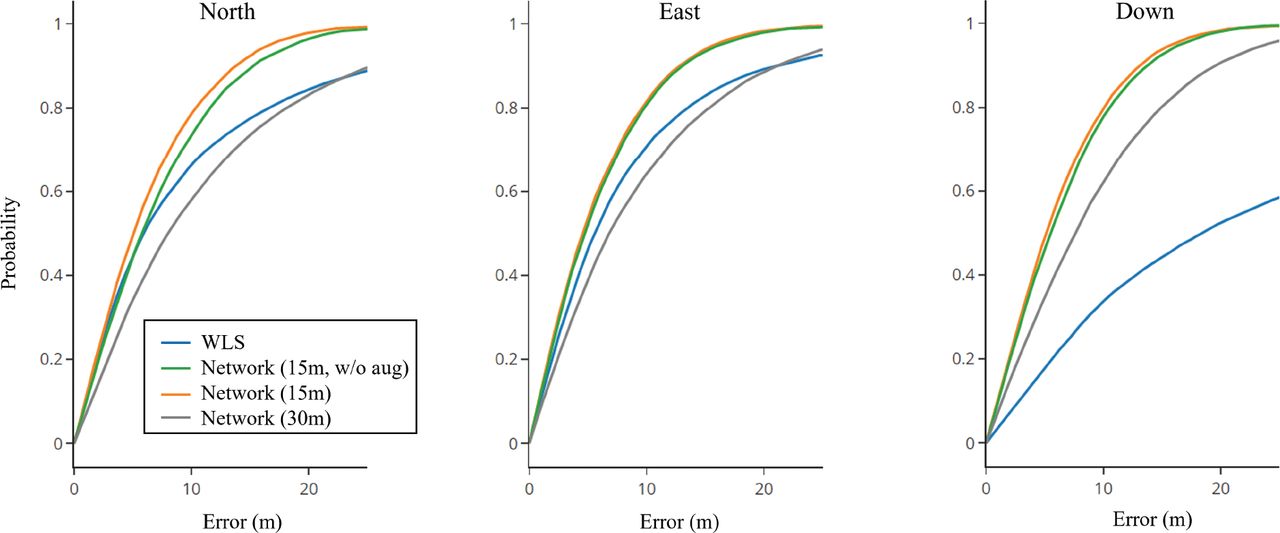
Cumulative distribution function (CDF) of the absolute error in position on test data along the local north, east, and down directions for our approach with η = 15 m, our approach without data augmentation, our approach with η = 30 m, and the WLS baseline
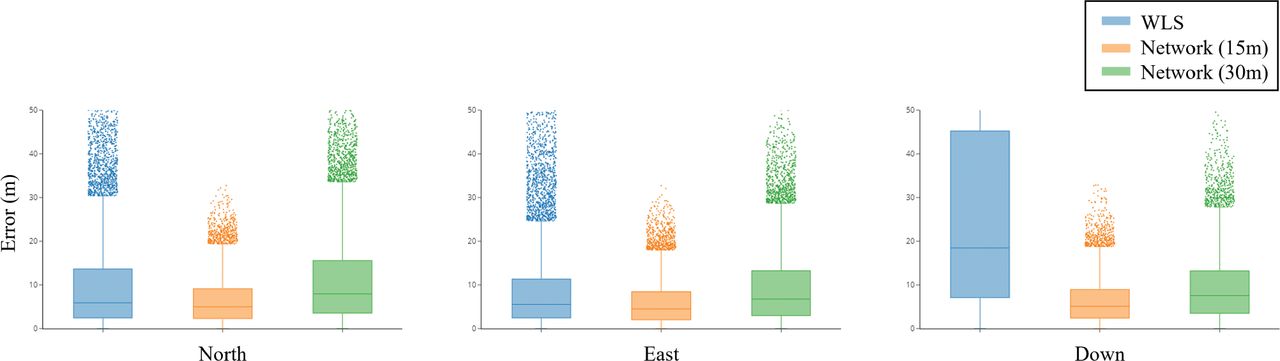
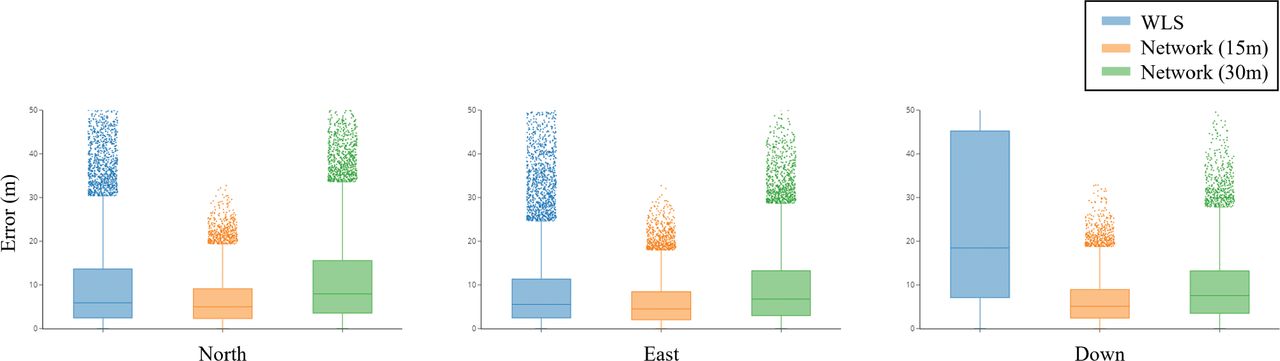
- FIGURE 8
Localization error on the Android Raw GNSS Measurements data set (Fu et al., 2020) in the north, east, and down directions, respectively, for WLS and our approach (initialization range η is 15 m and 30 m); the shaded regions cover the first quantile Q1 to the third quantile Q3, with the horizontal line representing the median.
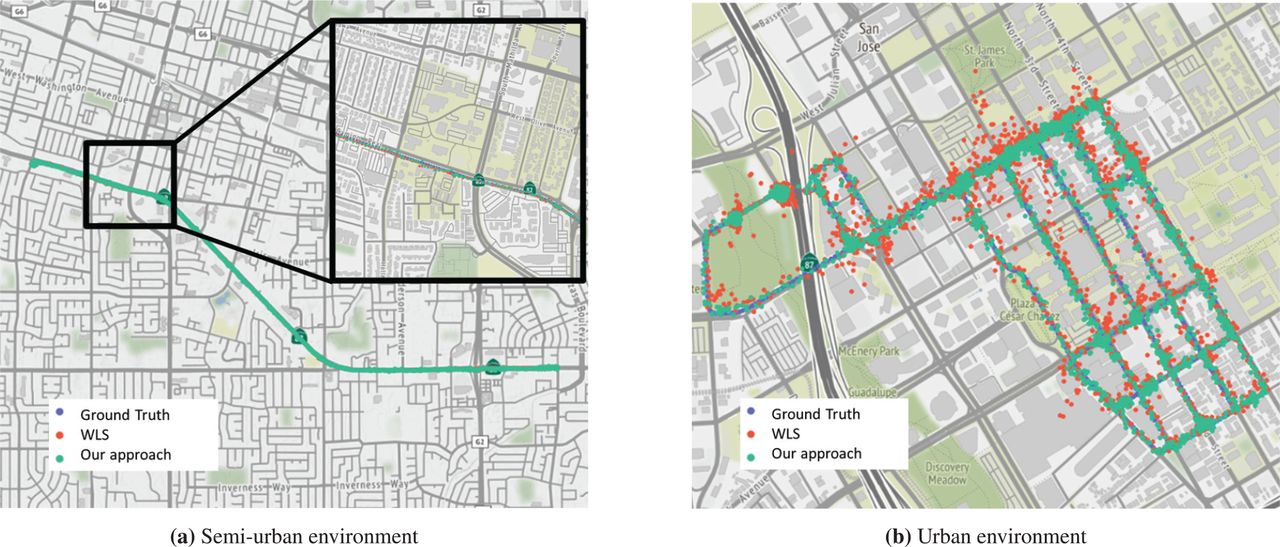
- FIGURE 6
Example of localized trajectories on the Android Raw GNSS Measurements data set (Fu et al., 2020) for (a) semi-urban and (b) urban environment conditions; the trajectory estimated using our approach is visually similar to WLS in the semi-urban environment and appears closer to the ground truth than the urban environment.



Tables
- TABLE 1
Mean Absolute Error in Position Along Each Direction for Different Simulated Sensor Error Characteristics
Scenario North (m) East (m) Down (m) Initialization 7.5 ± 5.0 7.5 ± 5.0 7.5 ± 5.0 Gaussian error 2.6 ± 2.0 2.4 ± 1.8 2.2 ± 1.6 Gaussian + bias error 2.8 ± 2.1 2.6 ± 2.0 2.4 ± 1.8 Note: In both scenarios, our approach reduced the positioning error over the baseline with random initialization by more than half the value.
- TABLE 2
Mean Absolute Positioning Error Along the North, East, and Down Directions in the Estimate of the WLS Baseline and Variations of our Approach
Scenario North (m) East (m) Down (m) WLS baseline 11.6 ± 51.9 9.7 ± 38.7 36.4 ± 265.9 Our approach with η = 30 m 11.1 ± 10.2 9.3 ± 8.5 9.3 ± 7.5 Our approach without data augmentation 7.1 ± 5.7 6.0 ± 5.1 6.6 ± 5.1 Our approach with η = 15 m 6.4 ± 5.2 5.9 ± 5.0 6.2 ± 4.9 Note: The variations at hand include NED corrections + η = 30 m, NED corrections + η = 30 m without data augmentation, and NED corrections + η = 15 m. We can observe that a smaller initialization range results in smaller position estimate errors, data augmentation improves performance on the testing data set, and that final positioning errors were significantly less than those of WLS estimates in the down direction for all cases.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Jump to section
Related Articles
Cited By...
- No citing articles found.