

Abstract
The positioning accuracy of global navigation satellite system receivers is frequently degraded in urban areas due to reflected signals. A moving receiver faces additional challenges because it needs to adjust to changes in the statuses of the signals received, including line-of-sight (LOS), multipath, non-LOS, or invisible. This paper proposes two new algorithms that can be used to enhance the accuracy of a moving receiver. The first algorithm is called Optimized Position Estimation (OPE). The OPE algorithm estimates the most likely paths and identifies the one with the optimal weight. The second algorithm is called Intelligent Signal Status Estimation (ISE). The ISE algorithm utilizes a self-organizing map machine-learning algorithm to estimate the probability of a change in signal status. The algorithms are tested using global positioning system C/A signals, which have over 50 changes in their statuses. The results obtained using these algorithms reveal that the accuracy is enhanced by as much as 96.3% (i.e., a 27-fold improvement) when compared to results using a conventional navigation algorithm.
1 INTRODUCTION
Multipath signals are a major source of positioning errors in urban environments. Global navigation satellite system (GNSS) signals often encounter obstacles on their path from a satellite to a receiver, including buildings, structures, and vegetation. These obstacles can obstruct, reflect, or diffract the signals to be received and may result in multiple versions of the same signal arriving at a receiver via different paths and with different code delays (McGraw et al., 2020). Therefore, multipath signals arriving with delays within 1.5 chips of the line-of-sight (LOS) signal correlate with the local replica signal and can lead to distortion in the cross-ambiguity function (CAF; Ziedan, 2014). A distorted CAF can lead to tracking and positioning errors. Positioning errors can also occur when the LOS signal is completely blocked and only non-LOS (NLOS) signals arrive at the receiver.
When processing GNSS signals, a conventional tracking module does not distinguish between LOS and multipath or NLOS signals. Therefore, a receiver continues to track a signal regardless of its status and generates pseudorange measurements for the navigation solution (Steingass et al., 2017; Ziedan, 2017). Erroneous pseudorange measurements that are contaminated by reflected signals can degrade positioning accuracy. One popular set of approaches used to overcome these errors focuses on the identification of multipath and NLOS signals and excludes these measurements from the positioning computation. These approaches range from simple integrity monitoring and consistency checking (Hwang & Brown, 2006; Parkinson & Axelrad, 1988; Yu, 1998) to those that involve more complex processing (Hsu et al., 2015; Jiang et al., 2011; Smolyakov et al., 2020; Wen et al., 2019; Ziedan, 2018). Some approaches use specifically designed receiver architecture to identify and exclude erroneous signals (Hsu et al., 2015; Smolyakov et al., 2020; Xu et al., 2020). While these approaches can be effective in increasing the positioning accuracy, discarding satellites can lead to poor geometry (Zhang & Zhang, 2009), an increase in the geometry dilution of precision (GDOP), and thus degraded positioning accuracy. Discarding data from contaminated satellites may also result in an insufficient number of satellites available for positioning computations.
Another set of approaches mitigates the multipath effect without discarding the contaminated satellites. These approaches usually work at the signal processing level. The earliest techniques that used this method were the Multipath Estimating Delay Lock Loop (MEDLL; van Nee, 1992) and the Double Delta approach (Garin & Rousseau, 1997; Garin et al., 1996). However, these approaches are not effective when dealing with multipath signal delays close to the LOS signal delay. Signals in urban multipath environments frequently include multiple reflections with a variety of path delays. More advanced methods include filter-based approaches (Closas et al., 2009; Giremus et al., 2007; Steingass et al., 2017; Ziedan, 2011) which can adjust to the presence of a small number of reflected signals before the processing overhead becomes a hindrance. Other approaches designed to address a relatively small number of reflected signals are those based on sparse estimation theory (Lesouple et al., 2019).
A recently developed category of approaches utilizes information from the surrounding environment for multipath mitigation. Three-dimensional (3D) building models, mapping, and ray tracing can be used to generate predictions regarding satellite status and the path lengths of the reflected signals. Examples of approaches that employ these predictions include shadow matching (Groves et al., 2020; Wang et al., 2013; Yozevitch & Ben-Moshe, 2015), ray tracing (Bradbury et al., 2007; Hsu et al., 2016; Lau & Cross, 2007; Miura et al., 2013; Ziedan, 2017), and neural networks (Li et al., 2019). While these approaches perform well in static multipath situations, they may not be fully adequate when used in dynamic mobile environments (Ziedan, 2022).
A receiver that is moving in an urban environment faces additional challenges for multipath mitigation. The status of the signals received is not constant and may change while the receiver is in transit. A signal can transition between four states, including LOS, multipath, NLOS, or invisible. For example, a LOS signal can become an NLOS signal when the surrounding structures block and reflect what was a direct signal. A tracking module can follow changes in these parameters and can continue to track an NLOS signal. Therefore, the objective of this paper is to develop an algorithm that utilizes both multipath and NLOS signals in position computations. The algorithms developed using this approach will be able to adapt to changes in the received signal status by identifying the transition from one status to another and adjusting the output accordingly.
Two algorithms are proposed. The first algorithm is called Optimized Position Estimation (OPE). OPE estimates the most likely sequences of positions on a map, where each sequence forms a path. OPE then identifies the path with the optimal weight. The second algorithm, which is called Intelligent Signal Status Estimation (ISE), contributes to the computation of the optimal weight. The ISE algorithm estimates the probability that a received signal will undergo a change in status and uses this information to compute the probability of transitions between these positions. Signal status changes based on the appearance or disappearance of LOS or reflected signals.
The ISE algorithm employs a supervised self-organizing map (SOM) neural network machine-learning algorithm (Kohonen, 1990) to compute the probability of a change in signal status. The features of the SOM network are extracted from a tracking module. The probabilities of status changes of the satellites above the horizon are used to compute the probabilities of a transition between positions. This information is then used to compute the weight function of the OPE algorithm. A conventional SOM network uses unsupervised learning and clusters inputs based on their features (Vesanto & Alhoniemi, 2000). By constrast, the proposed SOM network uses a supervised learning approach to estimate the probability of a change in signal status.
In a recent publication by Ziedan (2020), two position estimation algorithms that could be used in multipath environments were proposed. The first algorithm is called Map Matching with Tracking Feedback (MMTF). The MMTF algorithm finds the most likely candidate position on a map based on predictions from the received signal. The second algorithm is called Adaptive Position Estimation (APE). The APE algorithm uses output from the MMTF algorithm to compute code delay errors due to signal reflection and diffraction and removes them before proceeding to compute a position estimate. As observed by Ziedan (2020), the accuracies of the MMTF and APE algorithms differed from one another. In some cases, these differences were not small.
The proposed OPE algorithm integrates the MMTF and APE algorithms to achieve an optimized estimation of the signal position. The OPE algorithm extends the estimation to the most likely path instead of the most likely position. As described by Ziedan (2020), the status of a signal was estimated using a Gaussian-like function that generated a probability based on the estimated change in the carrier-to-noise ratio (C / N0). In this paper, the machine learning ISE algorithm utilized several additional features to estimate the signal status and did not rely on the C / N0 alone.
While the proposed OPE algorithm does not operate at the signal processing level, it does require information from the tracking module. Therefore, it can operate with any receiver as long as the tracking module can provide the necessary information (e.g., estimates of the C / N0). Furthermore, because the OPE algorithm estimates the most likely path, it can be classified as working with multiple epochs.
The remaining sections of this paper are organized as follows. First, the design of the OPE algorithm is presented; this is followed by the introduction of the ISE algorithm. The selection of specific features is explained in detail, followed by an explanation of the design of the SOM algorithm. The experiment and results are then provided. Finally, the summary and conclusions are discussed.
2 OPTIMIZED POSITION ESTIMATION (OPE)
The OPE algorithm developed for this study keeps track of the number (Ng) of the most likely paths over Nn steps. Each path has an associated weight, or Wg. After Nn steps, the path with the optimal weight is selected as the estimated path and the positions that constitute the estimated path are identified as the estimated positions.
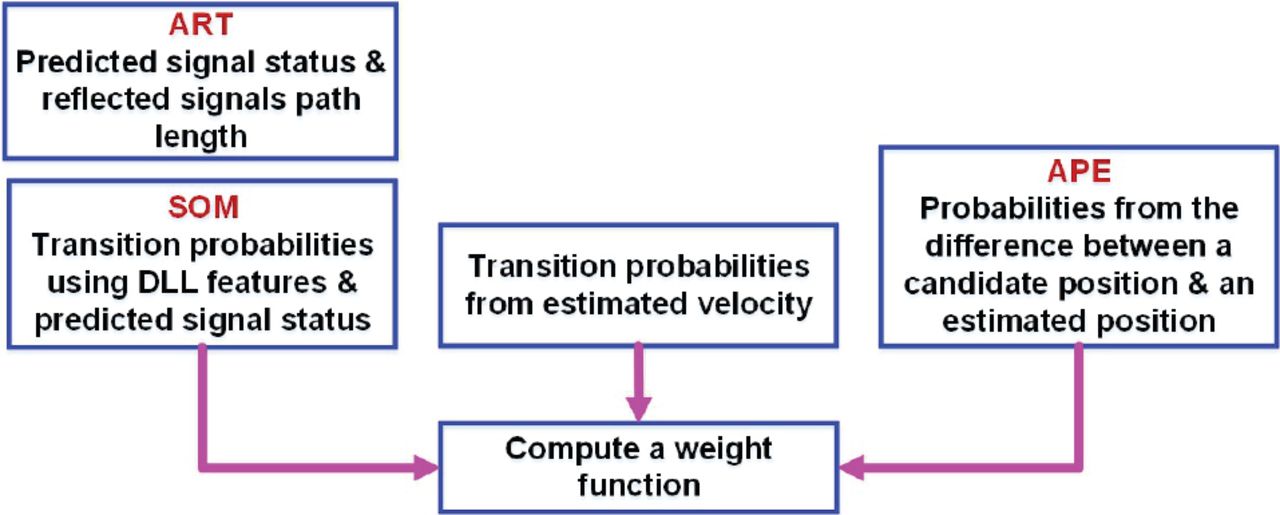
There are three functions that contribute to the determination of path weight (Wg). Various available data are utilized to determine path weight. 3D building models and the accelerated ray tracing algorithm (ART) developed as described in Ziedan (2017) are used to facilitate predictions of reflected signals and their path lengths. Analysis of information extracted from the tracking module is used to assess the probability of a receiver transitioning to a position based on the predictions of reflected signals. Therefore, the first function is computed from the transition probability,  , between two consecutive positions,
, between two consecutive positions,  and
and  , along a path, qg.
, along a path, qg.  , using the developed machine-learning ISE algorithm.
, using the developed machine-learning ISE algorithm.
The first function alone is not always sufficient because more than one position can yield similar predictions of reflected signals. The second function circumvents this issue by computing the probability that the  position is correct. This is done by accounting for the impact of the predicted code delays on pseudorange measurements and comparing the computed navigation solution to
position is correct. This is done by accounting for the impact of the predicted code delays on pseudorange measurements and comparing the computed navigation solution to  . Therefore, the second function is computed from the difference between
. Therefore, the second function is computed from the difference between  and an estimated position calculated by the APE algorithm as described by Ziedan (2020).
and an estimated position calculated by the APE algorithm as described by Ziedan (2020).
The third function is computed from the distance between  and
and  based on the estimated velocity. The objective of the third function is to minimize jumps in the estimated positions that may occur if there are more than one
based on the estimated velocity. The objective of the third function is to minimize jumps in the estimated positions that may occur if there are more than one  positions that yield similar transition probabilities,
positions that yield similar transition probabilities,  , even if these positions are not adjacent to one another. Figure 1 provides an outline of the functions that contribute to the computation of the path weight.
, even if these positions are not adjacent to one another. Figure 1 provides an outline of the functions that contribute to the computation of the path weight.

Outline of the functions that contribute to the computation of the path weight
Each most likely path, qg, consists of Nn most likely sequences of positions,  . The
. The  positions determined at a step n are based on a set of candidate positions,
positions determined at a step n are based on a set of candidate positions,  . In this case,
. In this case,  are a subset of
are a subset of  that have the highest transition probabilities from
that have the highest transition probabilities from  to
to  , as computed by the ISE algorithm and the distance between
, as computed by the ISE algorithm and the distance between  and
and  . Using the APE algorithm described by Ziedan (2020) for each position
. Using the APE algorithm described by Ziedan (2020) for each position  , the estimated signal status,
, the estimated signal status,  , for a satellite s is used to estimate the code delay error,
, for a satellite s is used to estimate the code delay error,  . The estimated
. The estimated  is removed from the code delay estimate,
is removed from the code delay estimate,  , and then a position
, and then a position  is computed. The difference between the most likely position
is computed. The difference between the most likely position  and the position
and the position  , computed as
, computed as  , is used to compute a probability
, is used to compute a probability  . Following this computation,
. Following this computation,  and the transition probabilities are used to update the weight function,
and the transition probabilities are used to update the weight function,  . After Nn steps, the path with the optimal weight is identified as the estimated path.
. After Nn steps, the path with the optimal weight is identified as the estimated path.
There are two types of estimated positions. The first type is estimated from candidate positions that are located at the center of predefined discrete cells on a map. These are the  of these positions. The second type is computed from a navigation solution. These estimated positions have continuous values and are not restricted to predefined discrete cells. Therefore, the estimated path is based on two sets of estimated positions. The first set is composed of the
of these positions. The second type is computed from a navigation solution. These estimated positions have continuous values and are not restricted to predefined discrete cells. Therefore, the estimated path is based on two sets of estimated positions. The first set is composed of the  positions, which are taken from the discrete map cells
positions, which are taken from the discrete map cells  ; this set of positions is called OPE map matching (OPE-MM). The second set includes the corresponding
; this set of positions is called OPE map matching (OPE-MM). The second set includes the corresponding  positions, which are calculated from a navigation algorithm; this set is called OPE navigation (OPE-NAV).
positions, which are calculated from a navigation algorithm; this set is called OPE navigation (OPE-NAV).
Figure 2 provides an overview of the OPE algorithm. The algorithm can be summarized as follows:
1. An initial position estimate, P0, is obtained. The most likely position
 is set as P0. The initial path consists of only , with weight .
is set as P0. The initial path consists of only , with weight .2. Candidate positions,
, located in the area around are determined.3. At each candidate position,
, the ART algorithm described by Ziedan (2017) is used to predict the signal status (i.e., LOS, multipath, NLOS, or invisible) of each satellite, s, above the horizon. The ART algorithm also provides predictions for reflected signal path lengths.4. The transition probability,
, between each and , is then computed using the ISE algorithm developed in this study in which represents the probability that the predicted signal status identified above in Step 3 is correct.5. Another transition probability,
, is then computed based on the estimated velocity for the path qg as follows:5.1 A value less than 1 is defined as κ and an average distance is defined as dav; both κ and dav are tuning parameters. Using this method, one can assign a probability between κ and 1 to candidate positions that are separated from a predicted position,
, by a distance of less than dav. As the distance increases beyond dav, the probability will decrease more rapidly. This is addressed below in Steps 5.2 through 5.6.5.2 The predicted position,
, at step n and path g, is computed as
1where
is the estimated velocity for path g, as per the APE algorithm as described in Step 9. Np is a number of steps and is also a tuning parameter. TNp is the time between step n – Np and n.5.3 The distance between
and each candidate position, , is computed as . The minimum distance between and all the positions is identified as .5.4 The following difference is computed:
.5.5 The ratio
is computed as
25.6
is
36. The total transition probability is
4where,
is used to update the weight function, , for each candidate position as
5where,
is the total weight for path g at step (n – 1), and wt < 1 is the contribution of a transition probability to a path weight.7. The Ng most likely positions,
, are determined as the candidate positions, , with the highest . The weights, , are set as of the Ng most likely positions. The Ng paths are updated by appending to each corresponding path, .8. Based on the signal status determined at each
, errors in the code delays are estimated. For example, an NLOS signal would generate an error in the code delay computed based on the extra path length of the NLOS signal compared to the path length of the LOS signal; the NLOS signal extra path length is obtained using the ART algorithm described in Step 3. More details on this calculation can be found in Ziedan (2020).9. For each
, the APE algorithm described by Ziedan (2020) is applied to compute a position, , and a velocity, .10. A probability,
, is computed based on the difference , where
6with σr as a standard deviation. This is also a tuning parameter.
11. The weight function,
, is updated as
712. If the current step number n is equal to Nn, then Step 13 is executed. Otherwise, the algorithm returns to Step 2.
13. The estimated path is identified as the path with the optimal weight. The estimated positions are set as the positions that constituted this estimated path. The position located at the end of the estimated path is used as an initial position, and the algorithm returns to Step 1.
















































Overview of the developed OPE algorithm
Figure 3 illustrates the transition from the most likely positions,  , to the candidate positions,
, to the candidate positions,  , and then to the following
, and then to the following  . Each oval represents one position. The circles inside each oval represent the statuses of the satellites above the horizon at that position.
. Each oval represents one position. The circles inside each oval represent the statuses of the satellites above the horizon at that position.
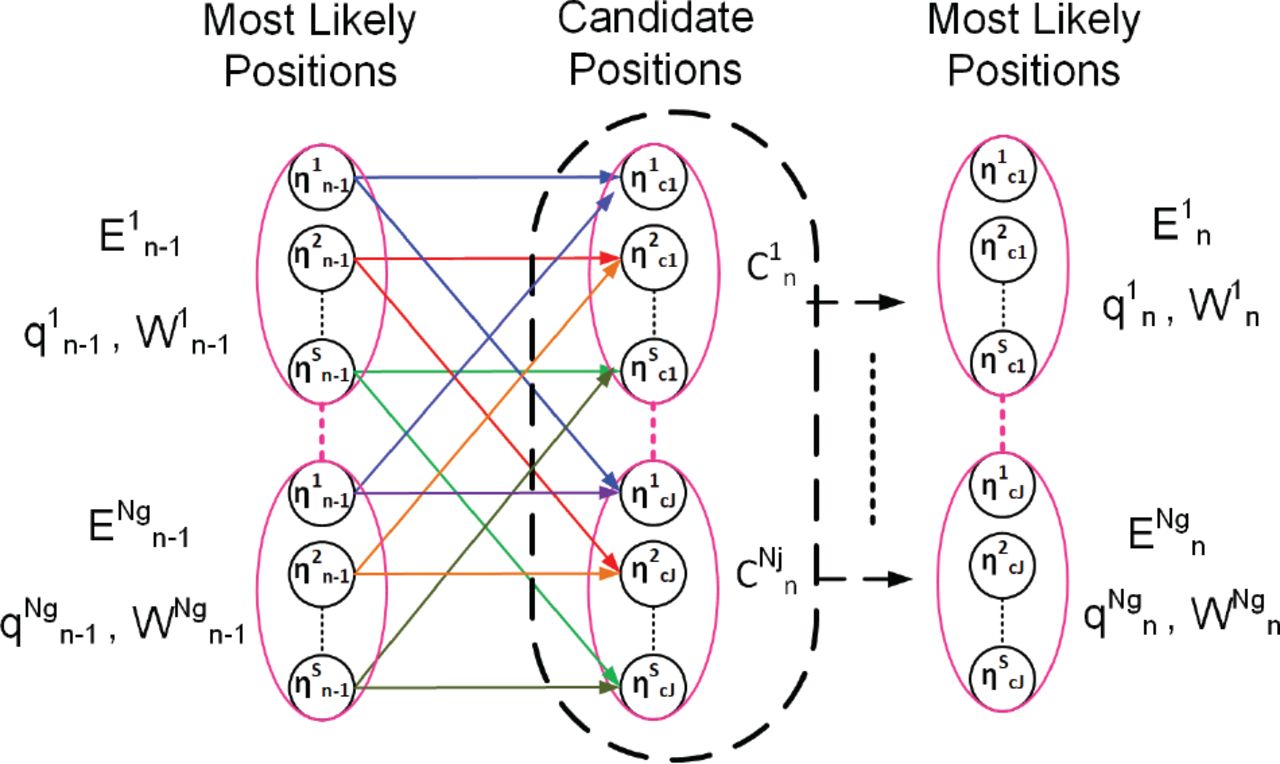
Illustration of the transition from the most likely positions,  , to the candidate positions,
, to the candidate positions,  , and then to the next
, and then to the next  ; each oval represents one position. The circles inside the ovals represent the statuses of the satellites above the horizon at that position.
; each oval represents one position. The circles inside the ovals represent the statuses of the satellites above the horizon at that position.
3 INTELLIGENT SIGNAL STATUS ESTIMATION (ISE)
The ISE algorithm uses several features to estimate the probability of transition between positions. This probability is computed from the probabilities of change in the signal status of the satellites above the horizon.
A probabilistic and supervised self-organizing map (SOM) neural network algorithm is introduced to estimate the probability of change in a signal status. SOM is a machine-learning approach used for data clustering (Kohonen, 1990; Vesanto & Alhoniemi, 2000). A conventional SOM is an unsupervised approach that can be used to classify input data into clusters with similar features. Several publications have described modified supervised and probabilistic approaches that use SOM functionalities to address problems in different fields (Barreto & Araujo, 2004; Papadimitriou et al., 2001; Polzlbauer et al., 2008; Song et al., 2007). A SOM consists of an input layer and an output layer. The input layer represents a number of Nnf features. The output layer transforms the input data into 1D or 2D maps with a total of Nnu neurons. A SOM involves both training and classification phases. Interested readers are referred to Kohonen (2001) for comprehensive details about SOM algorithms and their applications.
The features used as input for the SOM network include four features derived from the output of the delay-locked loop (DLL) and two features derived from the change in the C / N0. Although the change in the C / N0 was shown to be effective in estimating the transition probability in Ziedan (2020), machine learning was not used in that case.
3.1 ISE Features
The ISE features are derived from the output of the tracking module. These features and their significance are discussed in this section.
The objective of using a SOM is to quantize the effect of a change in a signal status based on a probability by using various features. The probabilities of status changes of the satellites above the horizon are used to compute the probabilities of transition between positions. These values are then used to compute path weights.
A Doppler shift changes the received pseudorandom noise (PRN) code duration, as explained by Ziedan (2006). A negative Doppler shift increases the code duration, while a positive Doppler shift decreases it. An interval T, considering a Doppler shift fd, was changed to Tfd as follows (Ziedan, 2006):
 8
8
where fL is the carrier frequency and αd is the Doppler rate. A tracking module generates an estimate of the start of the next integration interval as follows:
 9
9
where TI is the integration interval and tsi and tsi–1 are the estimated start of the i-th and (i–1)th integration intervals, respectively. fdi and αi are the estimated Doppler shift and rate, respectively. τei is the estimated code delay error generated from the DLL. When a loop is in a steady state, then τei should result in stabilization (i.e., it should have a zero mean and a stable variance). The mean and standard deviation of τei are defined as μτe and στe, respectively.
When a signal status changes due to the appearance or disappearance of a reflected signal, then τei will increase in magnitude, and μτe and στe will change. Experimental testing using real and simulated data revealed that it is possible to use μτe and στe to identify a probability of change in a signal status. One such experiment is shown in the text to follow. Therefore, μτe and στe are used to generate features for the ISE algorithm.
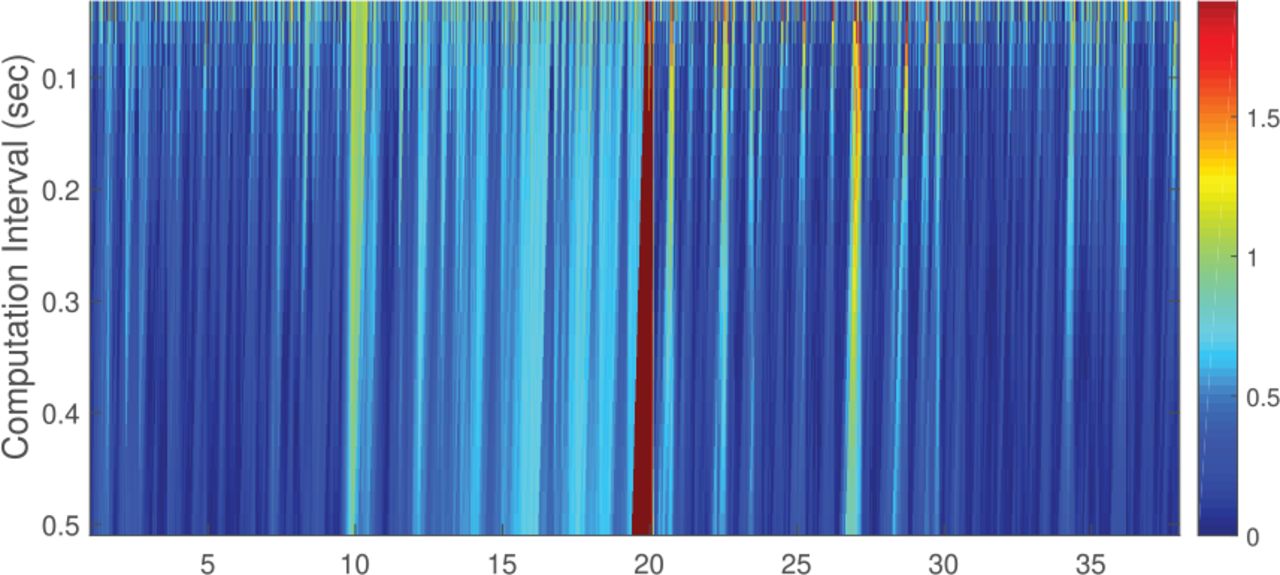
The following is an example of an experiment that illustrates the effect of a status change on μτe and στe that was run using simulated GPS C/A signals. GPS signals are simulated using the GNSS software receiver developed as described by Ziedan (2006) and Ziedan and Garrison (2008, 2009, 2011). A coherent integration of 20 ms is used, with fd = – 1500 Hz and αd = 0.5 Hz/sec. The sampling rate is fs = 6500 kHz. The measurement noise is generated from a white Gaussian distribution, while the oscillator phase and frequency noises are generated from normal random walks as described by Ziedan (2006). The runtime is 40 seconds. During the first 10 s, only the LOS signal is present with C / N0 = 40 dB-Hz. At t = 10 s, the LOS signal is blocked, and an NLOS signal appears with C / N0 = 35 dB-Hz and a code delay of τm = 0.23 chips. At t = 20 s, the LOS signal reappears. A new multipath signal appears with C / N0 = 30 dB-Hz and a code delay of τm = 0.314 chips. At t = 30 s, the multipath signal disappears. Therefore, this scenario presents three distinct status changes, which include LOS to NLOS, NLOS to multipath, and multipath to LOS, at t = 10, 20, and 30 s, respectively.
For illustration, μτe and στe are computed over intervals with lengths that range from 0.02 s to 0.5 s. This means that the two parameters are computed over 0.02 s, then 0.04 s, and so on. Figure 4 shows the heat map for μτe, where the horizontal axis is the start time of a computation interval and the vertical axis is the computation interval. The μτe values are normalized. As shown, at t = 10 s, there is a large increase in μτe when the LOS signal disappears and an NLOS signal appears. As the DLL converges, μτe decreases gradually, until it returns to a level similar to that observed before the change in signal status. At t = 20 s, the time point at which the LOS signal and a new multipath signal appears and the aforementioned NLOS signal disappears, the increase in μτe is larger than in the previous case, but the DLL converges more rapidly. At t = 30 s, the time point at which the multipath signal disappears and only the LOS signal remains, the increase in μτe is the smallest, and the DLL converges rapidly. Similarly, the heat map shown in Figure 5 documents the change in στe in which different status changes exhibited different patterns in the change of στe.
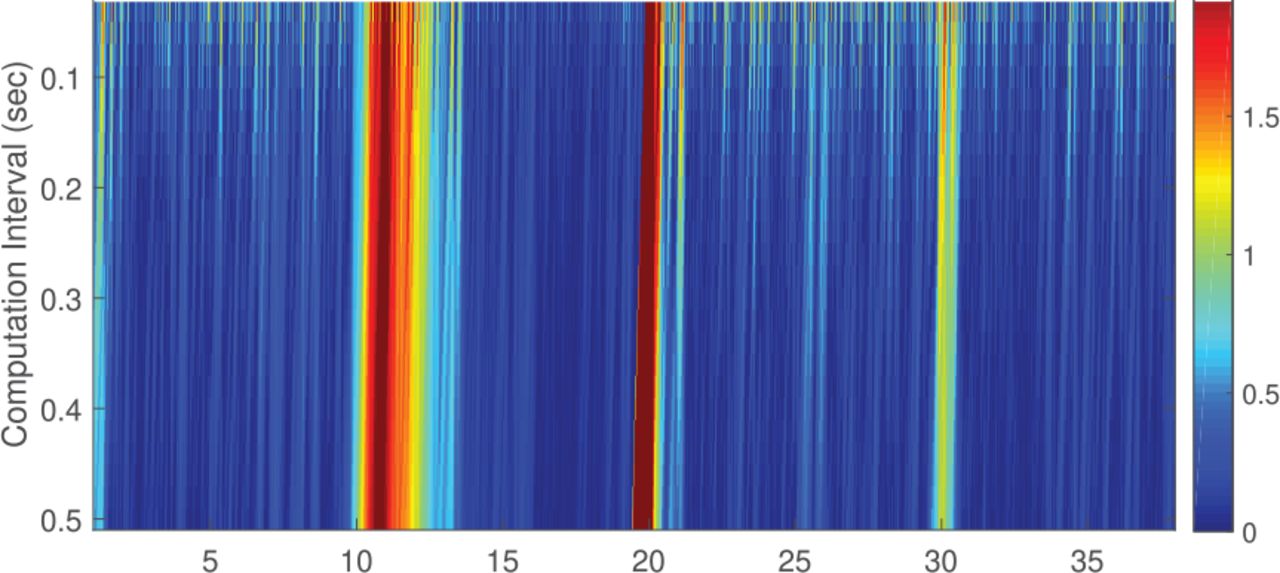
Illustration of the change in the mean, μτe, for the investigated scenario

Illustration of the change in the standard deviation, στe, for the investigated scenario
Based on the analysis presented above, four features are computed from μτe and στe. The feature computation is performed using a sliding window approach. This means that if a window has a size of (2j + 1), then for a position at time ti, the computation is performed using data from ti–j to ti+j. Meanwhile, for a position at time ti+1, the computation is performed using data from ti+1-j to ti+1+j, i.e., the window slides forward by a factor of 1. ti is defined as the time to check for a transition. Two time periods are defined; the first time period, TPi–1, begins and ends before ti, while the second one, TPi, begins and ends after ti. tsi–1 and tei–1 are defined as the start and end time of Tpi–1, respectively. tsi and tei are defined as the start and end time of Tpi, respectively.  is defined as the time period between tei–1 and tpi, where tpi is located inside Tpi. Figure 6 illustrates the relationship between these different time periods. The four features include:
is defined as the time period between tei–1 and tpi, where tpi is located inside Tpi. Figure 6 illustrates the relationship between these different time periods. The four features include:
The difference between the average μτe over Tpi–1 and Tpi, defined as Δμτei
The maximum change between the average μτe over Tpi–1 and the individual μτe over
The difference between the average στe over Tpi–1 and Tpi, defined as Δστei
The maximum change between the average στe over Tpi–1 and the individual στe over


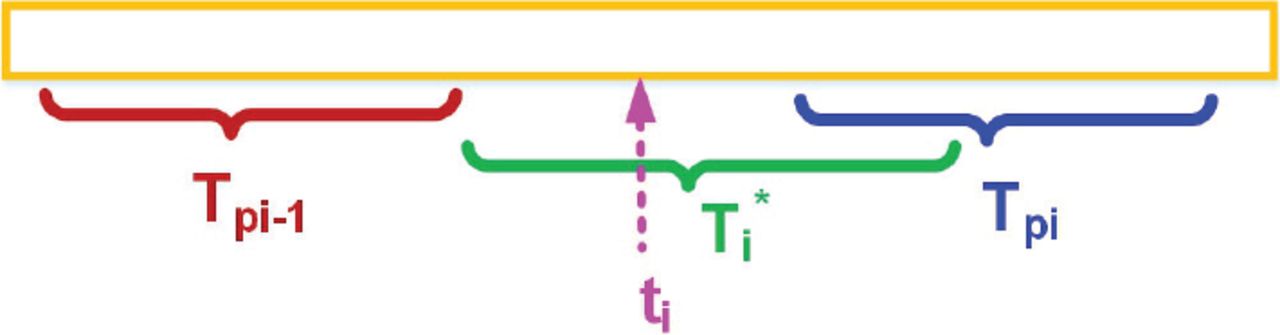
Illustration of the relationship between different time periods
The two additional features are computed based on the estimated  . This computational approach is similar to the one used for the first four features, which is as follows:
. This computational approach is similar to the one used for the first four features, which is as follows:
The difference between the average
over Tpi–1 and Tpi, defined as The maximum change between the average
over Tpi–1 and the individual over





3.2 Supervised Self-Organizing Map (SOM) Neural Network
This paper proposes a novel supervised SOM neural network algorithm. Conventional SOM algorithms are unsupervised and used to classify input data into clusters with similar features.
Four satellites statuses are defined as described by Ziedan (2020). These include LOS (L), multipath (M), NLOS (N), and invisible (I). Therefore, as explained by Ziedan (2020), there are 16 possible transitions. Each satellite, s, can have only one status,  , at a single instance n. A transition from a source status, X, to a destination status, Y, can take place with X and Y as either L, M, N, or I. The 16 potential transitions are as follows:
, at a single instance n. A transition from a source status, X, to a destination status, Y, can take place with X and Y as either L, M, N, or I. The 16 potential transitions are as follows:
If X = L, the potential transitions are L → L (LL), L → M (LM), L → N (LN), and L → I (LI).
If X = M, the potential transitions are M → L (ML), M → M (MM), M → N (MN), and M → I (MI).
If X = N, the potential transitions are N → L (NL), N → M (NM), N → N (NN), and N → I (NI).
If X = I, the potential transitions are I → L (IL), I → M (IM), I → N (IN), and I → I (II).
Four SOM networks are used (i.e., one for each source status). Each SOM network has a size of Nnu = 36 neurons. The inputs of each SOM network are the features extracted from a signal with a satellite source status that is similar to that of the SOM network. This means that the SOM network is designed to generate transition probabilities based on the assumption of a specific source status.
For the training phase, the inputs of each SOM network are used as training data for each of the four transitions with the same source status. The number of training samples for each SOM network are defined as NtX. Each training sample included Nnf = 6 features. SOM network training is performed using the MATLAB neural network clustering tool (nctool).
After training, each SOM network generates a weight matrix with a size equal to Nnu × Nnf. Each row in the weight matrix represents the weights of the Nnf features for one neuron. The weight matrices for the four networks are defined as Wx, X = L, M, N, or I. Figure 7 outlines the training steps. Of note, a conventional SOM network would classify a new sample by finding the closest neuron, i.e., the neuron located at a minimum distance from the sample to be classified. However, the SOM network developed here goes a step further and assigns each neuron with a probability of transition to each Y. This requires a conversion from unsupervised to supervised learning. Figure 8 outlines the steps involved in the conversion to supervised SOM, which is done as follows:
1. Each training sample is labeled by the transition that is used to generate it, XY.
2. The training is performed as is described above.
3. The Euclidean distance between each training sample and each neuron is computed. This produced a distance matrix, DX, for each network, with a size of Nnu × NtX. Each training sample is assigned to a neuron based on minimum distance. The minimum distance, dminXY, and the sample label are recorded.
4. Each neuron had labeled training samples assigned to it together with their dminXY. Different transitions with the same X could be assigned to the same neuron, albeit with different values of dminXY.
5. For each neuron, the probability of transition to each destination status is computed from dminXY. A probability matrix, PrX, of size Nnu × NY is computed for each network, where NY = 4 is the number of destination statuses with the same source. The probability matrix is computed using an approach similar to the one used to compute
in Section 2. The probability matrix is computed as follows:5.1 For each neuron, the mean distance, EuXY, of dminXY. of the samples with the same label is computed, where the subscript u refers to a neuron and XY refers to a label. EuXY is used as the main factor in the computation of the probability of transition assigned to a neuron.
5.2 For each destination Y, the mean of EuXY calculated over all neurons is computed as EXY. The minimum of EuXY from all the neurons is identified and defined as EminXY. The difference between EXY and EminXY is computed and defined as EdiffXY.
5.3 A ratio RXY is computed as
10where v is a value less than 1.
5.4 The entry in the matrix PrX for a destination Y and a neuron u, which represents the probability of a transition X → Y at a neuron u, is
The goal is to assign a probability between v and 1 to transition with a mean distance less than the mean EXY. The transition with the minimum mean distance EminXY will have a probability of 1 at its assigned neuron. As the mean distance EuXY increases beyond the mean EXY, the probability will decrease more rapidly.
6. The probability of a transition X → Y for a new sample is determined by finding the neuron in the network X with the minimum distance to the new sample. The probability of transition would then be
.7. The probability of transition
between a position and each candidate position, , is determined based on the status X at and the predicted status Y at .









Outline of the SOM training process

Outline of the proposed supervised SOM
3.3 Generating Training Samples
The training samples are extracted from the output of a tracking module that contained simulated GPS signals. GPS signals are simulated and tracked using the GNSS software receiver that was developed as described by Ziedan (2006) and Ziedan and Garrison (2008, 2009, 2011).
500 GPS signals are generated. Each signal included approximately 30 different transitions and lasted for approximately 150 seconds. This resulted in the generation of a minimum of 500 samples for each transition. Some transitions are present in more than 1,000 samples (e.g., multipath transitions) which covered a wide range of possibilities. Each signal parameter (e.g., C / N0, Doppler shift, number of multipath signals, multipath delays, power, and phase) is generated based on random distributions. All transitions times are marked for use in generating the training samples.
The output, which is the tracking of each signal, is processed to extract the six features required for each training sample. Each training sample is marked by its transition and is used in the supervised version of the SOM network developed in this paper.
4 EXPERIMENTS AND RESULTS
GPS C/A signals are used to evaluate the proposed OPE algorithm. The signals are generated using the Skydel software-defined GNSS simulator (Orolia, 2020). While the Skydel simulator can generate GNSS signals using a real route on a map, it does not consider the effect of the surrounding environment on the signals received, for example, multipath reflections. However, the simulator can generate signals from multipath reflections when the multipath characteristics and timing have been set up appropriately.
In order to generate signals that are typically detected in an urban area, an actual urban area is used as the location of the simulated scenario. The area selected for this simulation is located inside the main campus of Zagazig University, Egypt. The scenario start time is April 4, 2021, at 8:00 AM GPS time. The route of the tested scenario (described further below) is analyzed using the ART algorithm described by Ziedan (2017) to obtain satellite statuses and the path lengths of the reflected signals at each point on the route. Furthermore, the timing and duration of each signal are recorded and used to code a Python script for the Skydel simulator. The simulator is then run to generate the signals that identified the correct satellite statuses.
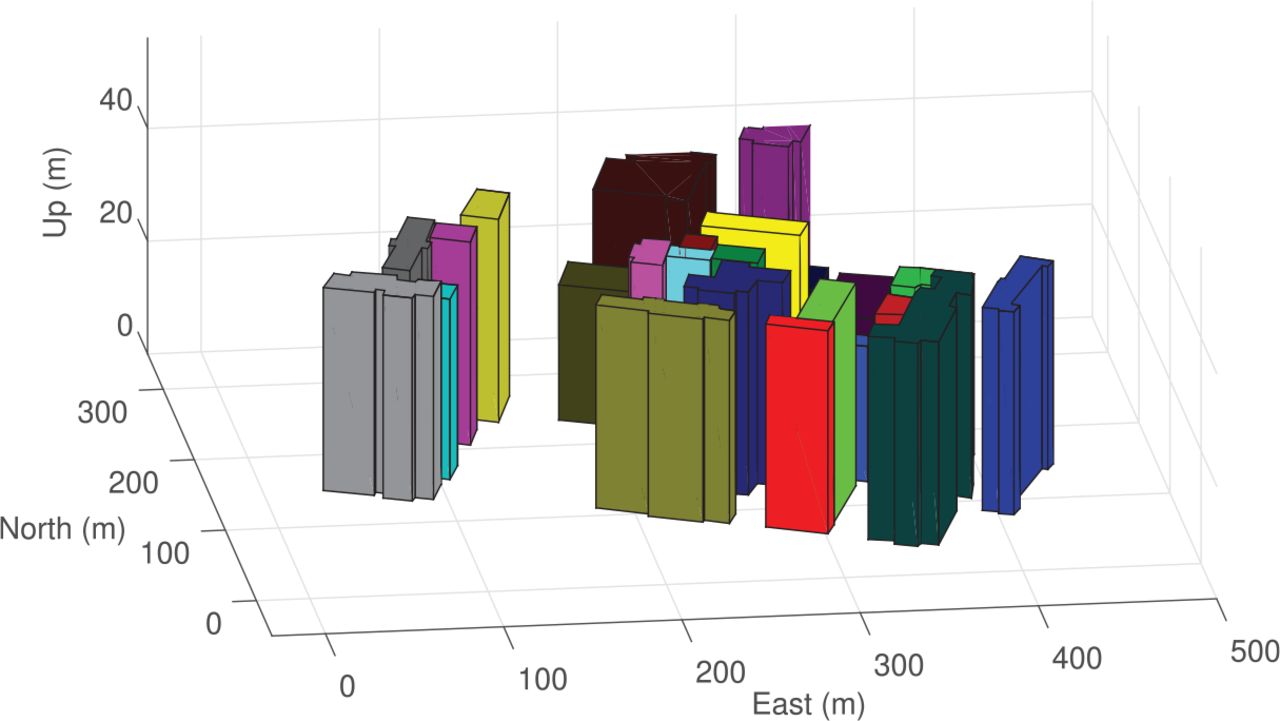
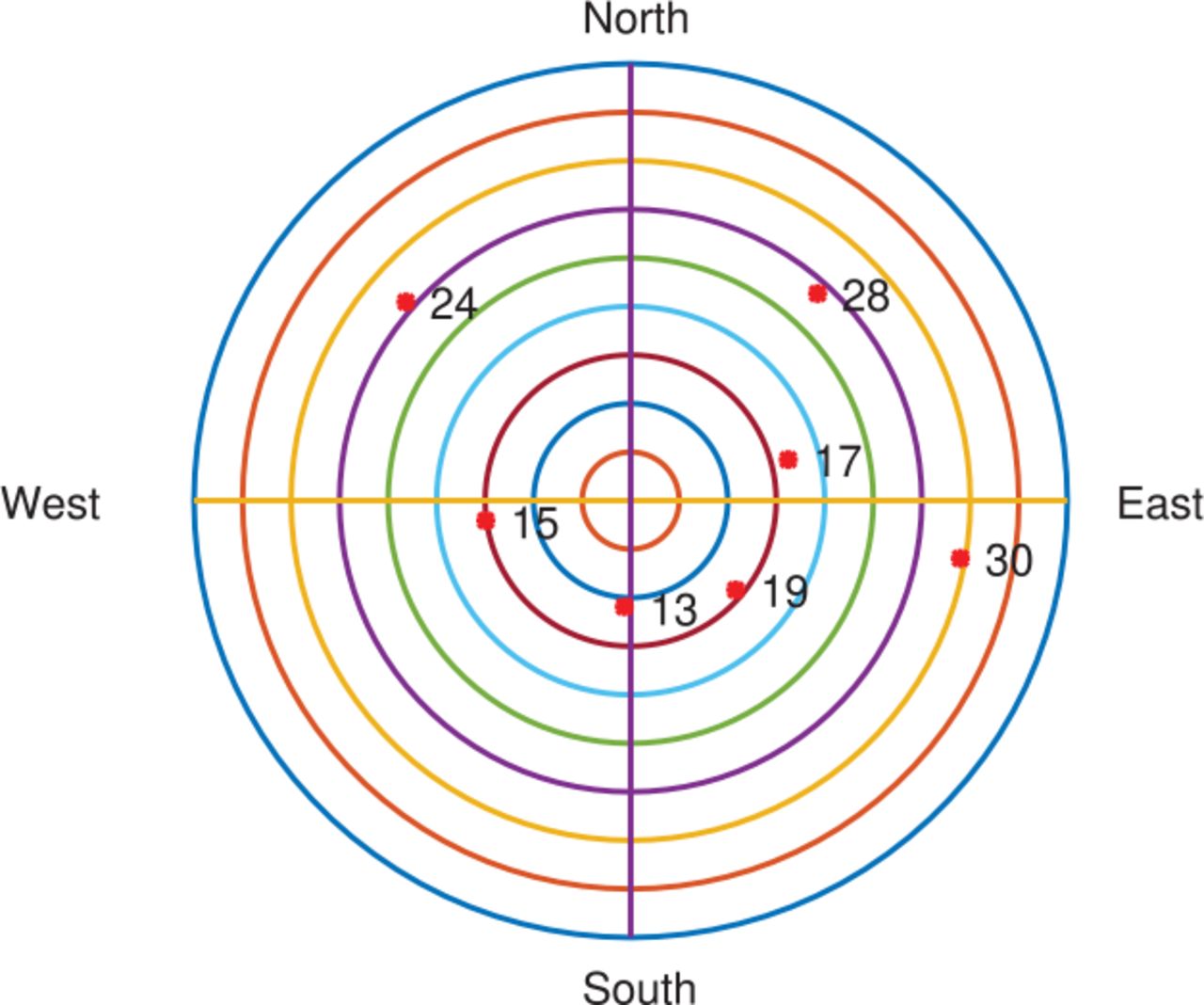
Figure 9 shows a display from the user interface (UI) of the Skydel simulator. Figure 10 shows this area on Google Earth. Google Earth does not provide 3D images of the buildings in this area; thus, 3D building models are constructed as described by Ziedan (2017). The constructed models are superimposed over the view shown in Figure 10. This model is needed to run the ART algorithm inside the OPE algorithm; therefore, the model is reconstructed using MATLAB as described by Ziedan (2017). Figure 11 shows the reconstructed model. There are seven satellites above the horizon during the simulation with PRNs of 13, 15, 17, 19, 24, 28, and 30. Figure 12 depicts a sky plot of these satellites.

A view of the tested area from the UI of the Skydel simulator

A view of the test area from Google Earth with superimposed 3D building models
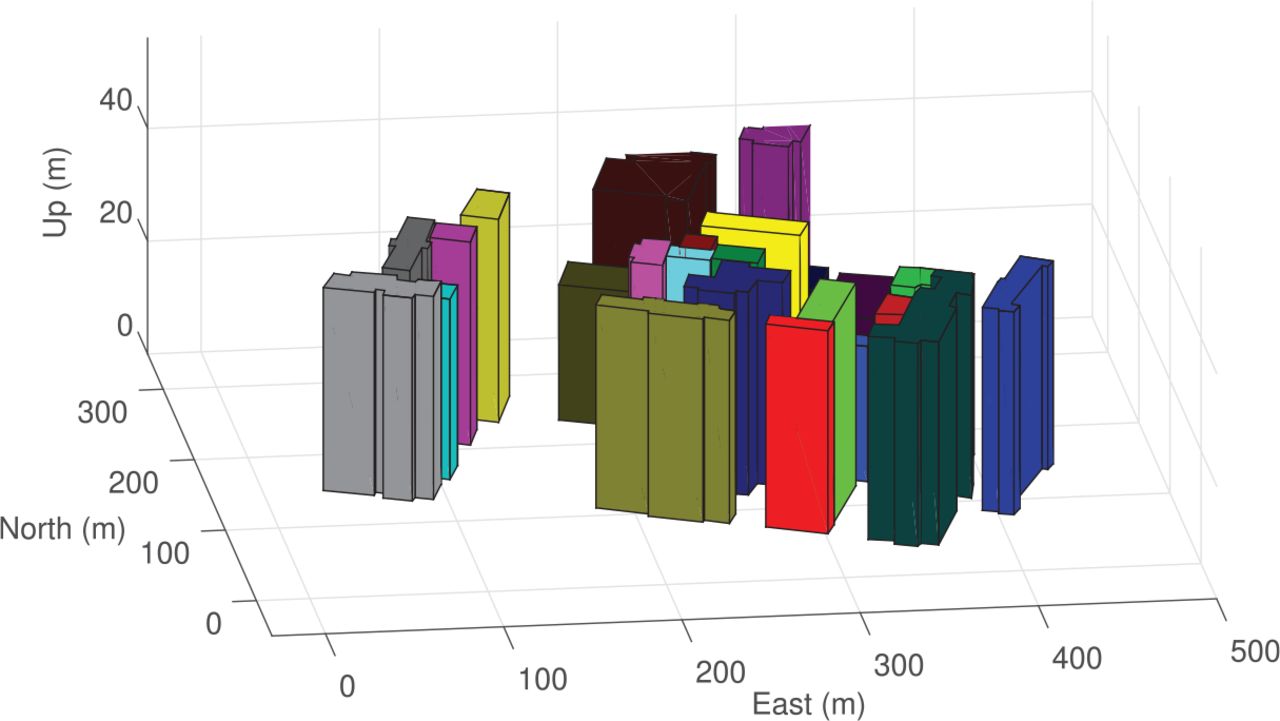
A reconstruction of the 3D building models

A sky plot of the satellites above the horizon
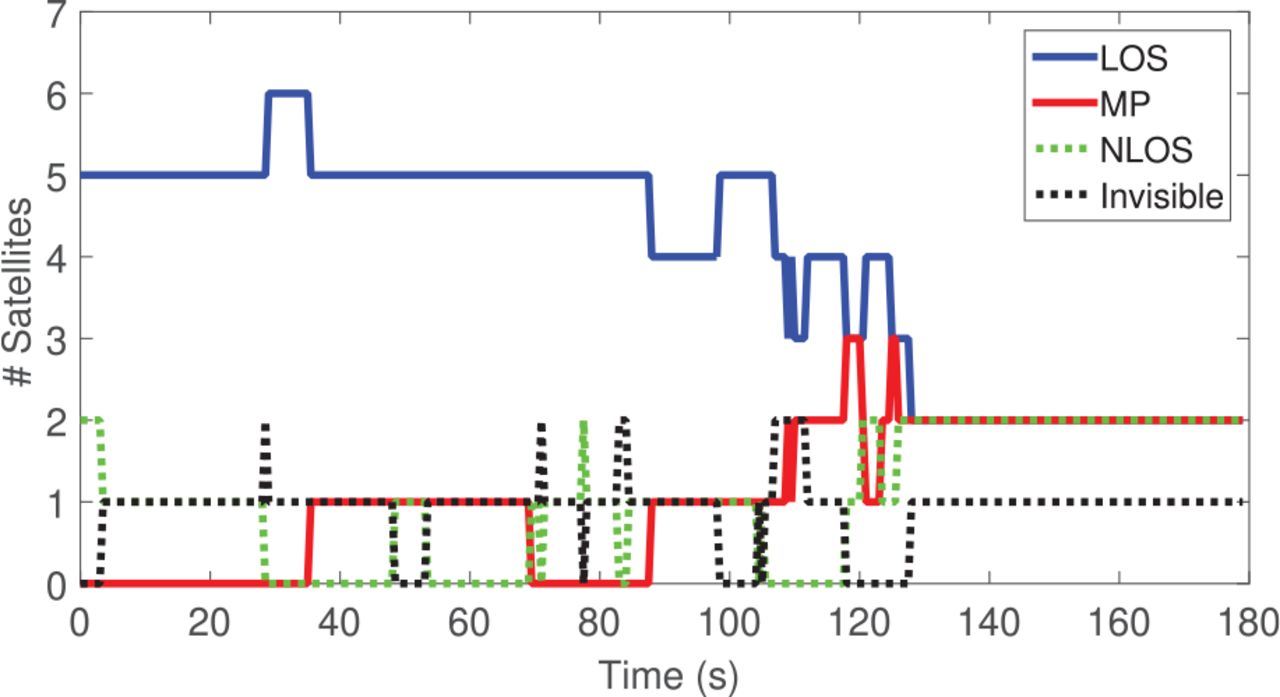
The simulated scenario began at the point marked Start Point and ended at the point marked End Point as shown in Figure 10. The total running time of the scenario is 180 seconds. A vehicle moving at a velocity of 4 km/hour is included in the simulation to represent heavy stop-and-go traffic. The scenario included four intervals. During the first and third intervals, the vehicle is moving. During the second and fourth intervals, the vehicle is static. The scenario began with the vehicle moving for approximately six seconds. The vehicle then stops for approximately 16 seconds, and then moves again for approximately 120 seconds until it reaches the End Point, after which it stops for approximately 40 seconds until the end of the scenario. The four intervals are defined as T1, T2, T3, and T4, respectively. The scenario includes more than 50 changes in signal status. Figure 13 shows the number of signals associated with each of the four statuses (L, M, N, and I) over the entire scenario. As shown, only five satellites are in LOS status between approximately 0 to 80 seconds, except for the short time during which a sixth satellite is in LOS. After 80 seconds, the number of LOS signals decreased, eventually reaching only two LOS signals during the final interval. Moreover, for most of the simulation, one or two of the satellites are invisible. The number of multipath and NLOS signals ranges from one to three each during the simulation. Figure 14 shows how the signal statuses of PRNs 24 and 30 change during the scenario. This scenario is thus suitable to test the OPE algorithm as it features a challenging environment with a continuous change in signal status.

Illustration of the number of signals in each of the four statuses (L, M, N, and I) over the entire scenario

Illustration of the changes in the signal statuses of PRNs 24 and 30 during the entire scenario
Each satellite above the horizon is acquired and tracked using the software receiver developed as described by Ziedan (2006) and Ziedan and Garrison (2008, 2009, 2011). The navigation message is decoded and used to obtain the parameters needed to compute the navigation solution. This is done as described by Ziedan (2019, 2020). The Skydel simulator provides a RINEX navigation file that is also used in the computation of the navigation solution.
For the OPE algorithm, an area of approximately 250 m by 250 m (i.e., 62,500 m2) is considered. The area is divided into cells with centers separated by 4 m. Cells located inside buildings are discarded. When testing, the ART algorithm is applied to each cell to obtain the status of each satellite and the path lengths of the reflected signals. The following values are used for the various tuning parameters: dav = 25 m, κ = 0.9, v = 0.9, Np = 9, and wt = 0.5.
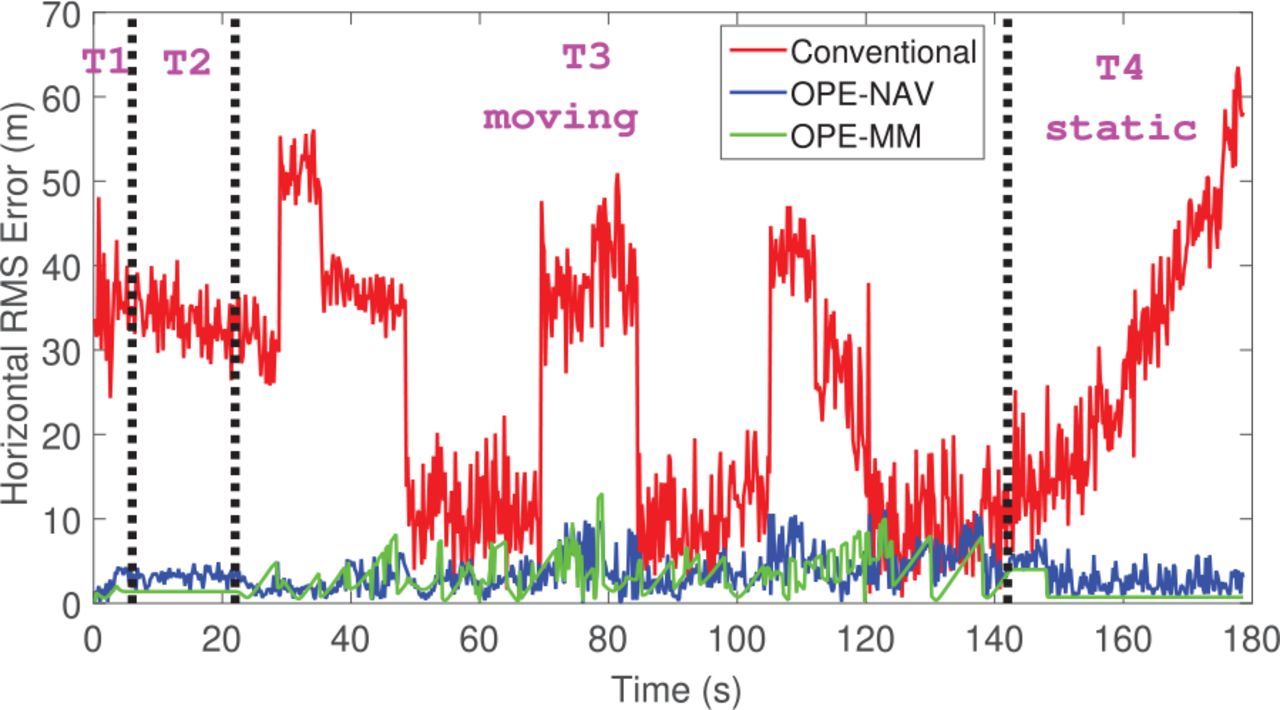
Positions are also estimated using a conventional navigation solution without applying the OPE algorithm for a comparison. Figure 15 shows the root-mean-square (RMS) of the ENU horizontal position error for the conventional approach as well as for the estimated OPE-NAV and OPE-MM over the duration of the scenario. The RMS error is computed every 200 ms. The jump in the positioning accuracy observed using the conventional approach is a direct response to signal transitions (i.e., becoming invisible or reappearing). The module used to track these signals can detect a loss of lock and can reacquire a signal once it becomes visible again. A complete description of the software receiver used here can be found in Ziedan (2006) and Ziedan and Garrison (2008, 2009, 2011). Meanwhile, there is no jump in the positioning accuracy when using either OPE-NAV or OPE-MM to estimate positions. The OPE algorithm can detect changes in the signal statuses and adjust the estimated code delay accordingly to mitigate potential errors resulting from multipath or NLOS signals estimated by OPE-NAV. The adjustment of the code delay is done as described for the APE algorithm (Ziedan, 2020). The use of the weight function contributes to the enhancement of the estimated most-likely cell and improves the accuracy of the estimated OPE-MM position. This enhancement in OPE-MM accuracy also enhances the accuracy of OPE-NAV positioning.

The RMS of the ENU horizontal position error for a conventional approach and the estimated OPE-NAV and OPE-MM positions over the entire scenario
There are only two LOS signals, two multipath signals, two NLOS signals, and one invisible signal at interval T4. As shown in Figure 15, the RMS error of the conventional approach degrades rapidly during this interval. However, the estimation accuracy remains stable when using the OPE algorithm, which also provides high-level positioning accuracy.
Figure 16 documents the RMS error for each interval of the scenario using both the conventional approach and the OPE algorithm. The accuracy enhancement provided by the OPE-NAV algorithm over the conventional approach is 92%, 90%, 84%, and 89% at intervals T1, T2, T3, and T4, respectively. The accuracy enhancement of the APE algorithm described by Ziedan (2020) compared to a conventional approach ranged from 67% to 80%. The accuracy enhancement of the OPE-MM positioning over the conventional approach is 96.4%, 96%, 85%, and 94.7% at intervals T1, T2, T3, and T4, respectively. The accuracy enhancement of the MMTF algorithm described by Ziedan (2020) that estimates cells on a map compared to a conventional approach ranges from 42% to 96%.

The RMS error at each interval of the scenario using a conventional approach and estimated OPE-NAV and OPE-MM positions
Collectively, these results suggest that the OPE algorithm can achieve superior accuracy enhancement when compared to the APE and MMTF algorithms. However, a direct comparison between the OPE, APE, and MMTF algorithms will be needed to assess actual differences in performance. This evaluation will be performed in a future study.
As shown by Ziedan (2020), no weight function was used, and the MMTF algorithm was used to estimate cells, not paths. In this situation, the APE and MMTF algorithms provided different accuracies when applied to different conditions. This result suggests that, in some cases, use of the APE algorithm results in better accuracy, while in other cases, the opposite is the case. Here, the OPE-MM estimated positions are more accurate than those provided by OPE-NAV by 54%, 57%, 6%, and 49% during intervals T1, T2, T3, and T4, respectively. The OPE-NAV positions are obtained using a navigation algorithm, while those generated by OPE-MM are based on cells on a map. This means that the computations used to generate OPE-NAV positions remain bounded by the signal characteristics (in this case, GPS C/A signals) as well as other error residuals (e.g., the ionospheric error residual when using the Klobuchar model). The OPE-MM estimated positions are limited by the position of the cell that is closest to the real position. Here, the cells have a 4-m2 size. This means that, in the worst-case scenario, the closest cell will be separated from the real position by 2 m in the north and east directions. Therefore, because positions are determined more accurately by the OPE-MM than the OPE-NAV, one can conclude that the use of the weight function by the OPE-MM contributes positively to its accuracy.
It should be noted that urban environments can encompass countless different scenarios with varying positioning results. Some of the factors that affect the positioning results include building heights and density, the type and distribution of vegetation, and the number of surrounding vehicles. Some settings will require specialized algorithms that address their specific needs. For example, the application of 3D building models and ray tracing algorithms may not be suitable for highly dynamic applications because of the need for increased processing to analyze more cells in a shorter period. Furthermore, positioning algorithms that utilize 3D building models might be affected by modeling errors.
5 SUMMARY AND CONCLUSION
Two new algorithms are introduced in this paper. The first algorithm, OPE, estimates the most likely path on a map, which is the path with the optimal weight. Three functions are used to compute the weight, including the probability of a transition between positions based on predictions of the signal status, the estimated velocity, and the difference between a position on a map and a corresponding position computed from a navigation algorithm. The second algorithm, ISE, is a probabilistic supervised SOM machine-learning algorithm that estimates the probability of transitions between positions.
The OPE algorithm generates two sets of estimated positions. The first of these is the set of OPE-MM positions, which correspond to cells on a map. The second set includes the OPE-NAV positions, which correspond to the OPE-MM positions, and are computed using a navigation algorithm after adjusting errors in the code delays based on reflected signals.
The estimations provided by the OPE-MM and OPE-NAV algorithms are not independent of one another. The OPE-MM positions are used in a function inside the navigation algorithm that provides estimates designed to minimize the difference between OPE-MM and OPE-NAV estimated positions. This difference is then used to compute the weight function of the most-likely paths. This means that there is some degree of feedback between the estimates of the OPE-MM and OPE-NAV positions that aims at achieving superior positioning accuracy.
The results presented in this paper indicate that the OPE-MM estimated positions have enhanced estimation accuracies ranging from 85% to 96% compared to a conventional navigation approach. At the same time, the accuracy enhancement provided by the OPE-NAV estimated positions compared to a conventional navigation approach ranges from 84% to 92%. The OPE-MM provides more accurate position estimates compared to the OPE-NAV, where the accuracy enhancement ranges from 6% to 57%.
The accuracy of the OPE-NAV algorithm is limited by the GNSS signal and constellation used (in this case, the GPS C/A signal). The OPE-MM algorithm is limited by the size of the cells used. The feedback between the elements that generate estimates of the OPE-MM and OPE-NAV positions aims at enhancing the estimated positions. The results indicate that this feedback has a positive effect on positional accuracy.
Modern GNSS signals and multi-constellation receivers typically provide better positioning accuracy than the legacy GPS C/A signal; use of these signals may have a positive effect on the performance of the OPE-NAV algorithm. However, this hypothesis needs to be investigated in order to assess the effect of different signals and constellations on overall performance.
HOW TO CITE
Ziedan, N. I. (2023). Optimized position estimation in mobile multipath environments using machine learning. NAVIGATION, 70(2). https://doi.org/10.33012/navi.569
This is an open access article under the terms of the Creative Commons Attribution License, which permits use, distribution and reproduction in any medium, provided the original work is properly cited.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Jump to section
Related Articles
Cited By...
- No citing articles found.