

Abstract
The systematic uncertainties in the difference between Coordinated Universal Time (UTC) and UTC realizations like UTC(k) are analyzed with a semi-historical algorithm using the uncertainties of the calibrations of only the extant time-transfer links and their covariance with clock predictions. It is important that the network has matured through recalibration, and that UTC was once generated with only GPS. This approach covers all types of links, including redundant links and cross links. The uncertainties of non-GPS links depend on the uncertainties of the pivot lab’s GPS system and the other system(s) used in the link. Clock predictions of labs not linked by GPS must be adjusted whenever the pivot lab’s GPS receiver is recalibrated. The resulting uncertainties differ by up to 45% from the results given in a recently published alternative proposal. Aging of the uncertainties leads to a blending of this approach with the current algorithm used by the International Bureau of Weights and Measures (BIPM).
1 INTRODUCTION
In 2006 and 2008, Lewandowski et al. developed a methodology for computing the uncertainties in UTC-UTC(k) and as of this writing the International Bureau of Weights and Measures (BIPM) uses a close approximation of them in its monthly bulletin, Circular T, which presents Coordinated Universal Time (UTC) through its differences with the UTC realizations (UTC[k]; Panfilo & Arias, 2019) available on www.bipm.org.
A key idea, adopted in all subsequent work, is that the uncertainties of UTC-UTC(k) are identical with those of the difference between the UTC(k) and the free-running timescale Échelle Atomique Libre (EAL). This is because UTC is related to International Atomic Time (TAI) through the introduction of leap seconds, and TAI is related to EAL through frequency steers. Since leap seconds and the steering of EAL have no associated uncertainties, it was assumed that EAL and UTC could be considered interchangeable. Additional considerations are that leap seconds are inserted simultaneously for UTC and its realizations, and frequency steering is independent of calibration errors in time-transfer equipment, which is the source of the systematic uncertainties under consideration.
With regards to systematic uncertainties, as opposed to statistical uncertainties, the premise and algorithm of the earlier papers (hereafter the instantaneous approach) has come under some controversy. In the October 2020 issue of Metrologia (Matsakis, 2020; hereafter M2020, and Panfilo et al. 2020; hereafter PPH2020). They differ from the previous papers in following a matrix formalism, which was anticipated in Petit and Zhang (2005). M2020 is consistent with the previous papers while PPH2020 comes to very different conclusions. Based on similar equations, their opposing conclusions can best be summarized as to whether the systematic uncertainty of any one clock (or UTC realization) minus the average of all clocks depends on the weights of the other clocks and on the systematic uncertainty of every link used by the BIPM to compute UTC.
This paper seeks to put these two approaches in a common framework by showing that the difference between the philosophy of the two approaches is largely a matter of which dependencies one wants to include in the uncertainty computation. The instantaneous approach is based on the premise that only the uncertainties of the measurements of the epoch in question are to be considered. The philosophy of PPH2020 is that one must take into consideration the systematic uncertainties’ effects on the old data that went into the clock predictions. This paper shows that the detailed computation of PPH2020 contains a questionable assumption that invalidates its least-squared approach. The assumption is that the bias of a GNSS-linked lab’s UTC realization equals the calibration bias of its GNSS system (PPH2020’s Equation [7]). However, the philosophy of PPH2020 could be fully realized by a different method that incorporates the history of the links without the need to undertake a least-squares analysis. Pivot labs play a crucial role in this method, termed the semi-historical approach below. Using one month’s Circular T data as an example, the Type B uncertainties are found to differ by up to 45% from those of PPH2020.
The relevance of systematic uncertainty computations is only to metrological evaluations. This is because UTC itself is designed and optimized for frequency stability. Hence, the weights going into the computation depend only on the inferred frequencies (Panfilo & Arias, 2019). These are independent of the overall biases, whose statistical properties this paper attempts to infer. In the Circular T itself, the only published numbers that depend on the algorithm are the numbers describing the very uncertainties that are the subject of this paper.
2 THE UNCERTAINTY FORMULATION
The algorithmic definition of EAL at any epoch can be found in many places including Panfilo and Arias (2019):
 2.1
2.1
where hn is the reading of any clock at a given epoch, wn is its weight, and  is a prediction of EAL – hn. In this expression, wn and
is a prediction of EAL – hn. In this expression, wn and  are based on data from previous epochs. The data consist of measured differences between clock readings, and the non-local measurements are contaminated by time-transfer noise and biases. The clock predictions in Equation (2.1) ensure some level of continuity when clocks are added or their weights are changed.
are based on data from previous epochs. The data consist of measured differences between clock readings, and the non-local measurements are contaminated by time-transfer noise and biases. The clock predictions in Equation (2.1) ensure some level of continuity when clocks are added or their weights are changed.
The clock predictions are based on over 50 years of data, defining the history of UTC and EAL. They are linearly related to past and present link calibration biases, and to the imprecision and inaccuracies of the astronomical data used to initialize UTC. For example, the initialization of EAL and UTC could be achieved or changed by adding a constant to all the clock predictions at the first epoch, and this would carry through to all epochs.
In the non-redundant network currently used by the BIPM, all the time-transfer links (hereafter, just links) involve a common laboratory (the pivot, whose acronym is PTB) and the link uncertainties are a mixture of station-based and link-based. Station-based data and uncertainties are properties of the station’s time-transfer equipment only. Link-based data and uncertainties are properties of the link’s time-transfer equipment instead of either station individually. GNSS data reduced via all-in-view or precise point positioning are station-based, while links involving fiber optics or two-way satellite time and frequency transfer (TW, also known as TWSTT) are typically link-based. For the purposes of this work, only GNSS data are treated as station-based. It is assumed that all measured calibration values have always been immediately incorporated into the data. The errors in those calibrations are unknown and denoted bn if lab n’s time-transfer equipment uncertainties are station-based. The bias of the link between labs n and m is denoted bn,m, which equals bn – bm if the link is station-based. Following the central limit theorem, they can be treated as stochastic quantities with normal distributions that have zero mean and standard deviations (uncertainties) σB,n and σB,n,m, respectively. If the link is based on a single GNSS observed by both labs, then bn,m = bn – bm = –bm,n and  . More complex formulas are used below for cases in which two labs for UTC generation are linked via a chain of direct links involving other modes and labs.
. More complex formulas are used below for cases in which two labs for UTC generation are linked via a chain of direct links involving other modes and labs.
With hk representing any clock reading, including steered UTC realizations and devices under test (DUT), EAL at any epoch is given by
 2.2
2.2
UTC minus any clock k, including a UTC(k), weighted or not, is given by
 2.3
2.3
Here NLeap is the number of the leap seconds inserted to keep UTC aligned with recent astronomical data involving Earth’s rotation, tepoch is the time of the current epoch, and ts is the time steer s was implemented. If leap seconds are inserted simultaneously to UTC and all clocks, they drop out of the differences and so will be ignored hereafter.
In Equation (2.3), a clock difference measurement at the current epoch is given by hn – hk, whereas the weights, clock predictions, and steers are functions of past data, whose detailed forms have been altered over the years. Therefore, the clock predictions can also be written
 2.4
2.4
where t denotes a past epoch, tnow is the current epoch, and cn,t defines the clock models that compute into the predictions. The last term, rn,tREFt, relates to the reference standard used to characterize clocks. Initially, it was solely EAL (itself a function of even more previous epochs) but currently the frequency drifts are determined using the calibrated frequency standards that define the second in the International System (SI). The cn,t and rn,t are often correlated across clocks and across epochs. Their functional forms are also epoch-dependent, particularly as network topologies and clock prediction algorithms have evolved. The weights, wn, and EAL-steering terms, ys, are functions of past measurements, but they are based on inferred frequencies and are thus independent of the time-transfer biases. Since they do depend to some extent on the statistical errors in measurements of previous epochs, ignoring them in computing Type A uncertainties of UTC-UTC(k) is a decision rather than a requirement.
Equation (2.4) is unwieldy and included merely to clarify the idea that the uncertainty of UTC-UTC(k) depends on which unknown biases and epochs one wishes to consider as contributing to the uncertainty of UTC-UTC(k), and which to consider as having no uncertainty contribution. Terms without uncertainty are considered to have become part of the numerical definition of UTC, which, once published, is never recomputed. Returning to Equation (2.3), the law of propagation of uncertainties (JCGM/WG 1, 2008) relates the overall uncertainty to the bias and noise derivatives of Equation (2.3) that one considers applicable. For systematic uncertainties, a variation, δ, due to an unknown bias is equivalent to the derivative with respect to that bias variable being multiplied by the bias value itself, and can be applied to Equation (2.3) as:
 2.5
2.5
Since the algorithm computes steers and weights based on frequency measurements, which have no bias contamination, the last summation of Equation (2.5) can be ignored, resulting in
 2.6
2.6
 2.7
2.7
In Equation (2.7), the first summation embodies the measurement data of the epoch in question, and the second summation is corrupted by the systematic uncertainties of the initialization and past measurements. Note also that all clocks measured at a given institution bear identical variations and uncertainties with regard to UTC. Among other reasons, this is because their local measurements are assumed to have negligible bias and noise. Therefore, for brevity, it will hereafter be assumed that every lab has one clock and that this clock, though unsteered, serves as the lab’s UTC realization.
In the instantaneous approach, currently used by the BIPM, none of the derivatives from past epochs are retained and the second summation in Equation (2.7) is ignored. It was noted in M2020 that the resulting uncertainties in UTC-UTC(k) represent the statistics that observers who had installed extremely high-quality optical fibers between the labs would find when using their data at the epoch in question in concert with the pre-determined weights and clock predictions. This approach has been criticized because it has no use for the correlations between the biases of previous epochs and clock predictions (G. Petit and G. Panfilo, personal communication, November 14, 2020). The bias correlations between epochs are not relevant in this approach because the predictions for the current epoch are predetermined and, on this basis, considered an immutable and numerical part of the definition of UTC.
To the opposite extreme, one might wish to consider every uncertainty indicated by Equations (2.3) and (2.4). Unfortunately, the uncertainties of the astronomical data in the early 1970s were of order 1.5–2 ms (D. McCarthy, personal communication, March 28, 2022) and the time transfer uncertainties in the 20th century started at the microsecond level (Guinot et al., 1971) while falling to a 10-ns level later. They are now at the several nanosecond level. The systematic uncertainty of UTC-UTC(k) would grow without limit as each new link calibration adds its contribution to the older ones.
A good compromise between the historical and instantaneous approaches would be to consider, for each extant link only, the bias dependencies of the epochs since the last calibration. As with the instantaneous approach the effect of no-longer used calibrations and the astronomical initializations, embodied in the clock predictions, are ignored. These can be considered hardwired or calcified parts of a frequently-redefined definition of UTC. This will be termed the semi-historical way hereafter. It follows the philosophy, though not the letter, of PPH2020, and this paper is dedicated to exploring its consequences.
3 A PIVOTLESS SINGLE-GNSS NETWORK IN THE SEMI-HISTORICAL APPROACH
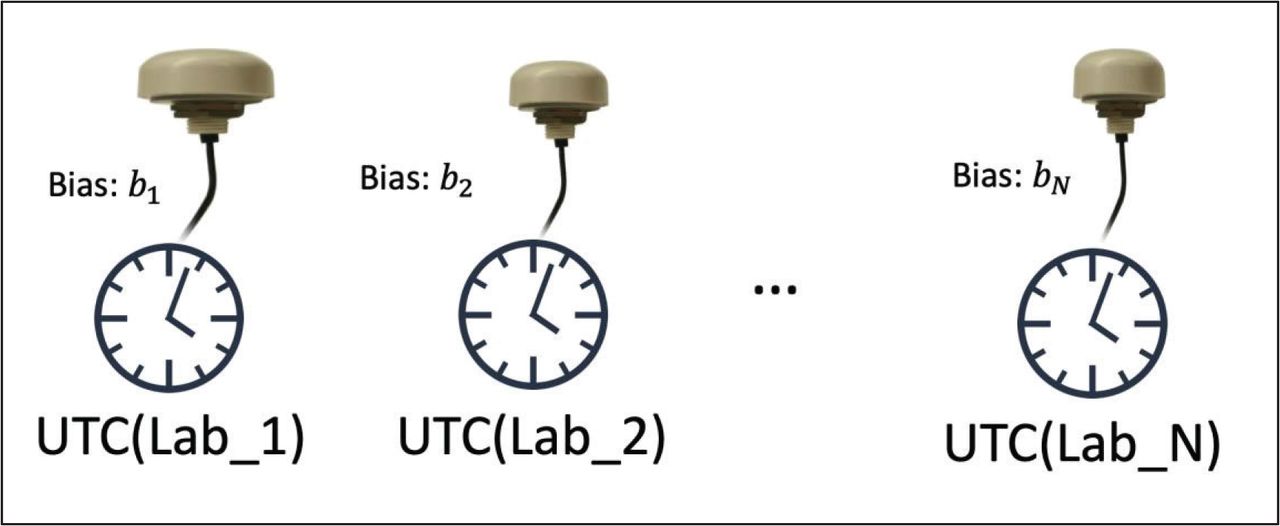
A network utilizing a single GNSS system has no pivot lab (Figure 1), and all the uncertainties are station-based. In this section, it is shown that the biases in UTC-UTC(k) may initially have a range of values, but in the semi-historical approach they will evolve towards a simple result in which each lab’s uncertainty with respect to UTC exactly equals that of its own GNSS system’s calibration. That evolution will include new labs being incorporated into UTC, and be complete once every initial lab has had its GNSS setup recalibrated.
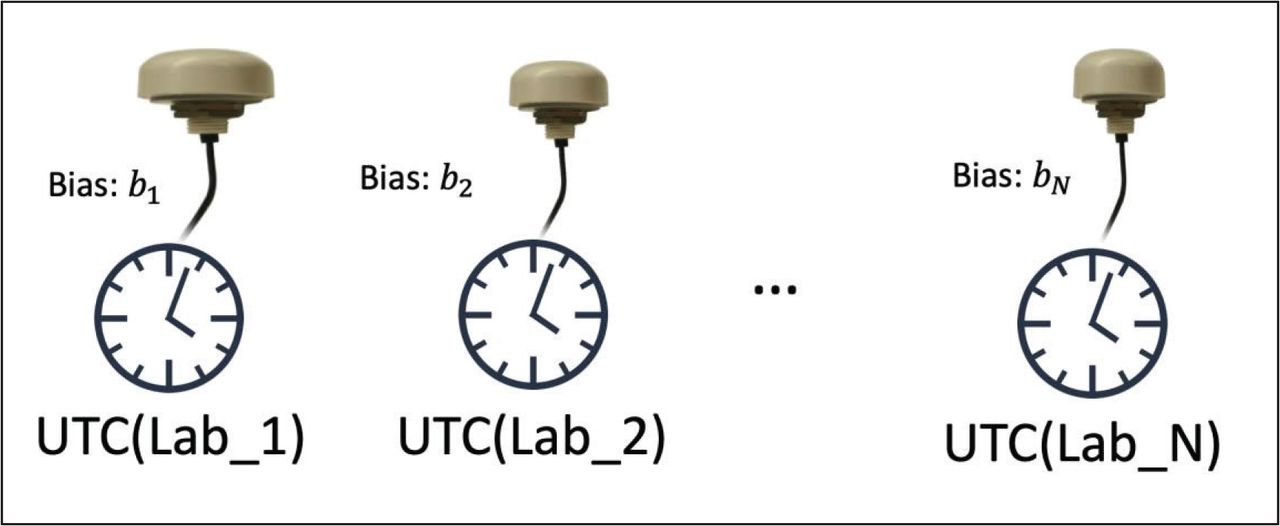
A single-GNSS network has no pivot to the extent the uncertainties are station-based.
A formula that explicitly shows the (unknown) biases of a station-based measured clock reading is:
 3.1
3.1
where hn0 is the true clock reading, which would be observed in the difference with other clock readings if there were no biases in the measurements. If a second GNSS system is involved (such as Galileo), the subscript S may be included for clarity, such as bnS.
The difference between the station-based clock readings of labs n and m, can be written
 3.2
3.2
The bias contamination of Equation (2.7) is
 3.3
3.3
Since the weights are normalized
 3.4
3.4
In the instantaneous approach, only the uncertainties of measurements at the epoch in question are considered. The clock predictions are considered immutable, and the second summation becomes zero.
 3.5
3.5
The statistics are given by the square root of the average value of the square of the right-hand side. In this case, since the noise and biases are uncorrelated, the squared systematic and statistical uncertainties are given by
 3.6
3.6
Identical formulas can also be derived for Type A uncertainties, based on the noise rather than the biases. Since past history is intentionally ignored, the statistics can be computed via least-squares solutions that use just the measurements and uncertainties of the extant links. Lewandowski et al. (2006, 2008) presented a means to mathematically compute the above expressions for both station-based and link-based uncertainties, and equivalent matrix formulations were given in Matsakis (2020, 2021).
If one wishes to include the uncertainties associated with past data, it is possible to derive a very plausible solution that utilizes the fact that systematic errors are systematic. It requires the assumption of PPH2020 that the clock predictions are linearly related to the bias of only their own lab’s time-transfer equipment as follows:
 3.7
3.7
where  is what the clock prediction would be if lab n’s GNSS system’s unknown bias were exactly zero, as it is assumed to be in UTC computations. This relation is plausible because the BIPM creates predictions for a new lab based upon a period of observations in which the laboratory had no weight in UTC. Inserting this relation into Equation (3.4) yields
is what the clock prediction would be if lab n’s GNSS system’s unknown bias were exactly zero, as it is assumed to be in UTC computations. This relation is plausible because the BIPM creates predictions for a new lab based upon a period of observations in which the laboratory had no weight in UTC. Inserting this relation into Equation (3.4) yields
 3.8
3.8
Since the bias terms in the summation have been eliminated, the square root of the average square immediately yields
 3.9
3.9
where σB,k is the uncertainty of the GNSS equipment at lab k, and hk can be UTC(k) or any clock locally measured against UTC(k) and, as noted, this result depends upon the validity of Equation (3.7).
However, the premise only applies if the initialization biases can be ignored. Assuming the network was initialized by independently measuring each lab’s clock against an external standard the initial predictions would be given by
 3.10
3.10
where bn,initial is the bias related only to the initialization at the first epoch. Once initialized, links with biases bn are placed into use, but their biases would not be cancelled inside the summations that define EAL/TAI/UTC. Without this cancellation, the analog to Equation (3.8) becomes
 3.11
3.11
If one is willing to ignore the millisecond-level initialization biases when the initialization is via astronomical means, this formula is identical to Equation (3.5), and leads to the uncertainties as computed by the instantaneous approach. That formula would also be recovered if the initialization was by means of a simple bootstrap in which each clock’s reading was taken as is, for then bn,initial = 0 at the start. In another variant of this approach, let the first lab’s initial clock reading be the initialization standard. Then bn,initial = bn – b1, and so the unknown bias and therefore the uncertainty of the first lab’s GNSS calibration contributes to that of all other labs. A similar result happens if the first lab was initially the only lab, and the other labs were subsequently added—mathematical derivations of these are given in the next section.
As new labs are added, the unknown initial biases will corrupt the predictions for them. This is because those biases will contaminate the observations used to establish the predictions for the new labs. The uncertainties of these labs would be the square root of the average value of the square of Equation (3.5), except that the summation would only include the original N labs, whose weights would no longer sum to 1. Note that the converse is not true. Biases of the new labs will not affect the predictions or uncertainties of the original N labs because the bias corruption of the new labs’ clock predictions will nullify the biases of the measurements involving their clocks.
Although the semi-historical approach does not yield the simple result of Equation (3.9) at initialization, it will approach it as the original labs recalibrate or upgrade their GNSS setups. The change is mathematically equivalent to completely downweighting the recalibrated lab and introducing a new lab that just happens to have the same clocks. As with the labs added after initialization, its clock predictions are revised so as not to impact UTC. Assume for definiteness that it is Lab N, its GNSS system’s uncertainty bN is replaced by the new uncertainty bN, new, and its clock model is adjusted by bN – bN, new according to the findings of the recalibration. Since bN no longer describes an extant link, its contribution to the uncertainty of all the other labs is ignored and there is one less lab contributing to the summations of Equations (3.3), (3.8), and (3.11). Since the initialization biases are ignored, Lab N then has a bias contamination equal to  . Once every lab in this pivotless network has been recalibrated there are no terms left in the summation, and the bias contamination of each lab is just that of its own time-transfer system. The uncertainty of every UTC-UTC(k) then equals the uncertainty of Lab k’s GNSS system, and Equation (3.9) is fully valid.
. Once every lab in this pivotless network has been recalibrated there are no terms left in the summation, and the bias contamination of each lab is just that of its own time-transfer system. The uncertainty of every UTC-UTC(k) then equals the uncertainty of Lab k’s GNSS system, and Equation (3.9) is fully valid.
This does not mean that the actual value of each UTC-UTC(k) is independent of what the initial biases were; only the dependence of each UTC-UTC(k) on the calcified biases and their contributions to the clock predictions is ignored. For those labs that steer their clocks so that UTC-UTC(k) is near zero, it is the amount of steering applied by the labs that would be dependent on the past biases.
4 PIVOTS WHEN ONLY EXTANT LINKS ARE CONSIDERED (SEMI-HISTORICAL)
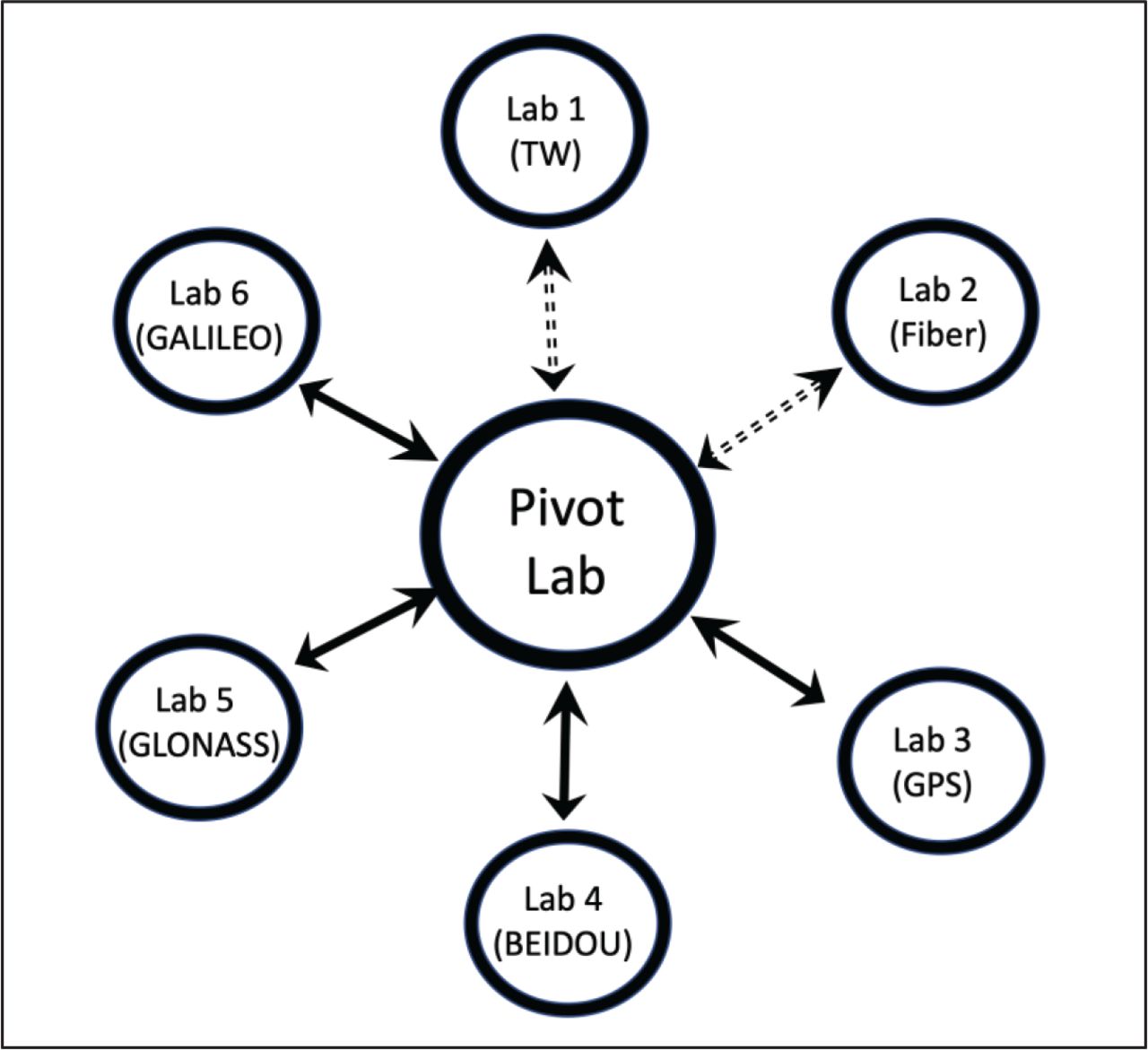
The network used to compute UTC has evolved over the years, and will continue to do so. Figure 2 shows multiple link types, although UTC is currently computed with TW, fiber, and GPS links connected to the pivot lab. In the future, modes may be used in parallel, and crosslinks directly used.
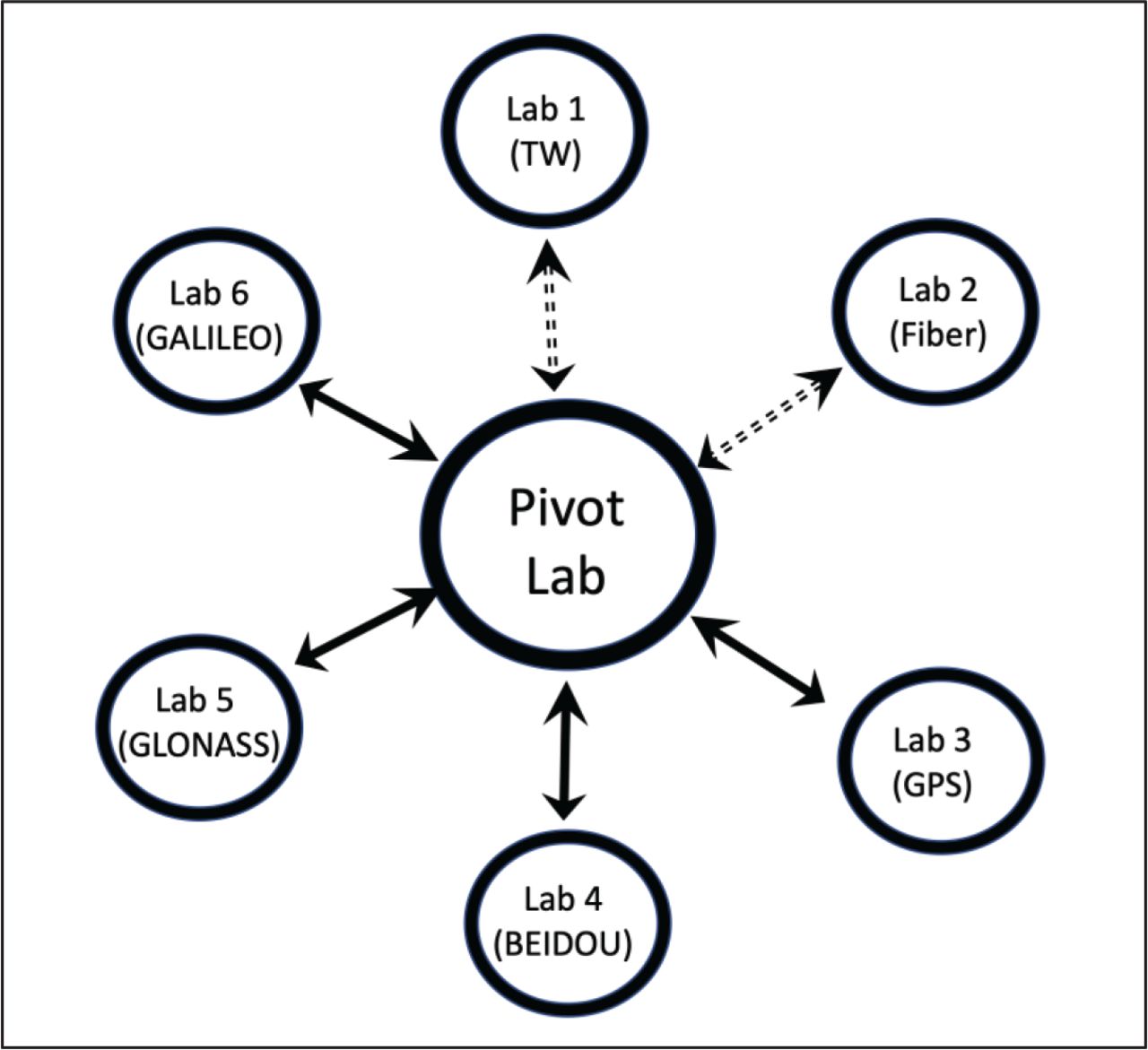
The topology of a single-pivot multi-mode non-redundant network. Links with station-based uncertainties are identified with a single solid arrow; those with link-based uncertainties are shown with dashed double-arrows.
Pivots are inevitable when more than one time-transfer mode is used because the definition of EAL requires every clock to be differenced with every other one. For a measurement involving labs with dissimilar modes, differencing the labs requires differencing through a chain of labs including at least one pivot lab for which both modes are enabled. For a GNSS-enabled lab, n, and a TW-enabled lab, m:
 4.1
4.1
where p refers to a pivot lab. If the measurements in Equation (4.1) are station-based and of the same mode, their bias contamination is
 4.2
4.2
If the measurements are link-based, all that can be written is:
 4.3
4.3
And if the modes at the pivot are different but both station-based, such as GPS and Galileo,
 4.4
4.4
where bpS refers to the bias of the pivot’s second station-based system, S.
Consider how one can build up a network from one lab to two labs and then to the three labs shown in Figure 3. With no loss of generality, we can assume that each lab has only one clock whose unsteered output is its UTC realization, no leap seconds are inserted, and there is no steering of EAL, so that UTC=TAI=EAL. The semi-historical approach ignores initialization uncertainties, but we can alternately assume that any initialization constraint of interest has been incorporated into the first lab’s clock reading or clock predictions with negligible uncertainty. While for simplicity only one lab is added at a time, the generalization to many initial labs and many simultaneous new lab additions is straightforward.

Lab #1 is the sole lab until Lab #2 is linked to it by GPS. Later, Lab #2 becomes a pivot linked to Lab #3 via a second station-based mode as shown, or by TW.
When there is just one lab, the UTC timescale originally is just the output of that one lab’s clock, adjusted by an ignorable initialization constant. The calibration status of any time-transfer equipment at this point is irrelevant for UTC, although it would be important for any user attempting to access that lab’s UTC realization non-locally. The bias contamination of any predictions for that lab’s clock(s) would be zero, and so would be the uncertainties in UTC-UTC(k=1).
When a second laboratory is added, its introduction is required to have been preceded by an extended period when the second lab’s clock was observed against UTC as defined by the first lab. During this period the data for the first lab has no bias contamination, as the second lab’s clock is unweighted, so that
 4.5
4.5
Whether the link is via TW or GNSS, the bias-contaminated difference between the clock readings of the new lab and the lab that is still defining UTC would be:
 4.6
4.6
From Equation (4.6), the observation period for the second lab will result in the predictions
 4.7
4.7
Thus the full uncertainty of the link is incorporated into the predictions for the new lab, including the contribution from the first lab’s GNSS system if the link is station-based. Once the second laboratory is weighted, Equation (2.2) yields
 4.8
4.8
where hereafter prediction terms will be identified by being enclosed in brackets where they are first used.
 4.9
4.9
So the bias contamination to UTC – h1 remains 0 (for any time-transfer mode). In other words:
 4.10
4.10
Using the clock predictions of Equation (4.3), the newly weighted lab’s difference with UTC is given by:
 4.11
4.11
 4.12
4.12
 4.13
4.13
The bias contamination of UTC – h2 is therefore –b2.1, which, if the link is station-based, can be decomposed into b1 – b2.
Following the standard statistical reasoning used throughout this paper, the uncertainty of the two labs would be a special case of Equation (3.9)
 4.14
4.14
 4.15
4.15
where, for a GNSS link with station-based uncertainties,  .
.
If the second lab had been the initial lab, the uncertainties would be reversed, and this shows that it is not always possible to determine the systematic uncertainties in UTC-UTC(k) using only the measurements, weights, and uncertainties of the epoch in question. However, if the first lab’s GNSS system were recalibrated,the second lab’s prediction would be adjusted by the difference between the old and new calibrations. Following the semi-historical approach, the corruption from the old calibration of the first lab would be ignored for the purpose of computing the uncertainties. The bias corruption of the new lab would be considered to be only that of its newly recalibrated system so that Equation (3.9), UB,UTC–hk = σB,k, would apply fully and without reservation. It can be shown that, if other labs had been added pre-recalibration, their uncertainties would be corrupted as was the second lab’s. Once all the initial labs had been recalibrated, the fully mature network would again be described by Equation (3.9).
Assume now that the first lab has been recalibrated and the bias corruptions of the predictions of each GNSS lab, k, have become bk. When a new lab linked by a different mode is added, a period of unweighted observations is again used to generate its clock predictions. For simplicity, we assume the new lab is the third, as in Figure 3. In this configuration, the second lab is now the pivot lab (designated p) so that a measurement of h1 – h3 is achieved by double-differencing with the pivot:
 4.16
4.16
 4.17
4.17
During the evaluation period, the contribution of biases to the first two labs’ predictions remain b1 and b2, and the data from the third lab yield:
 4.18
4.18
 4.19
4.19
If the third lab is linked to the pivot via TW, then bp,3 is the unknown bias of the TW system. If the third lab is linked via different GNSS from the first two labs, denoted S for station-based, then bp,3 = bpS – b3 and the uncertainty of that link is the root-sum-square (RSS) of the uncertainties of the two relevant other GNSS systems. Either way once the third lab is weighted the bias contribution to its difference with EAL will be:
 4.20
4.20
 4.21
4.21
If the first lab had not been recalibrated before the third was added, the above equation would have an additional term,  . Either way the uncertainties of the first lab and the pivot would be that of their own GPS system at most, whereas the third lab’s uncertainty would depend on at least the pivot lab’s calibration uncertainty as well. While in this section only three labs have been considered, it is straightforward to show that in a mature single-pivot topology whose earlier links were GPS-only,
. Either way the uncertainties of the first lab and the pivot would be that of their own GPS system at most, whereas the third lab’s uncertainty would depend on at least the pivot lab’s calibration uncertainty as well. While in this section only three labs have been considered, it is straightforward to show that in a mature single-pivot topology whose earlier links were GPS-only,
 4.22
4.22
 4.23
4.23
 4.24
4.24
Note that the only thing to distinguish the GNSS systems is which one was used first. The next section will show that these same formulas apply when the pivot lab’s GPS system is recalibrated, provided the predictions for the pivot as well as all labs linked to it by non-GPS modes are adjusted accordingly.
5 RECALIBRATING PIVOTS AND THE SEMI-HISTORICAL APPROACH
The previous section showed that it is important to know what links to a pivot were established first. This section uses that information to develop a scenario in which a mature (every system recalibrated) pivotless GPS-based system is augmented with new labs linked by TW and a non-GPS station-based system (S), utilizing a common pivot lab, p. Equation (2.2) can be rewritten with separate summations for the GPS, TW, pivot, and S-linked labs as follows:
 5.1
5.1
where the pivot lab, p, is excluded from the summations and the semicolon indicates that only the described terms are included in them. Following the reasoning of the previous section, if every lab except the pivot had been recalibrated the contaminations of the clock n’s predictions before recalibration are given by −bn if it is a GPS-linked lab including the pivot, −bp – bp,n if it is a TW lab, and −bp + bpS – bn if it is a lab linked to the pivot by a second station-based mode. Inserting these predictions within the brackets:
 5.2
5.2
Before the pivot’s GPS calibration is adjusted the bias contaminations within the first summation are all only −bk and so for any GPS-linked lab including the pivot
 5.3
5.3
where  and it is noted that if k is a pivot lab, some bk terms simply cancel their neighboring bp terms.
and it is noted that if k is a pivot lab, some bk terms simply cancel their neighboring bp terms.
 5.4
5.4
After a recalibration of the pivot’s GPS system, the pivot’s clock predictions will be adjusted for the difference in calibration values, and the associated unknown GPS bias will be bpnew. It is important that the predictions of the TW-linked and S-linked labs also be adjusted. In this case, the bias contamination of the post-calibration equation remains as in Equation (5.4), where bp only appears if k is the pivot, in which case it is now bpnew.
Note that if the predictions of the TW and S-linked labs had not been adjusted, the bias contamination of their predictions would still be bp, and the formula would have been
 5.5
5.5
where  and
and  . The uncertainties of UTC minus the non-GPS labs would also yield weight-dependent results if the clock predictions of the labs downstream for the GPS labs were not adjusted to compensate for the pivot lab’s recalibration.
. The uncertainties of UTC minus the non-GPS labs would also yield weight-dependent results if the clock predictions of the labs downstream for the GPS labs were not adjusted to compensate for the pivot lab’s recalibration.
From Equation (5.2), the pre-recalibration bias contamination of the TW-linked lab would be:
 5.6
5.6
If the clock predictions for all TW-linked and S-links labs are adjusted by replacing bp with bpnew, the post-recalibration contamination is
 5.7
5.7
From Equation (5.2) the pre-recalibration bias contamination of a lab linked by station-based system S would be:
 5.8
5.8
 5.9
5.9
Therefore, for every lab in the network, the only change in the bias contamination of EAL – hk is that bpnew replaces bp in the formulas. The variations of the links can be converted into the uncertainties of UTC-UTC(k) as follows:
 5.10
5.10
 5.11
5.11
 5.12
5.12
6 DISCUSSION
The above exercises show the importance of following the history in the non-instantaneous approaches, with the exception of mature pivotless single-GNSS networks. Table 1 shows differences that occur within the current network topology, which has a single pivot lab and many TW labs. It uses the same month’s data reduced by PPH2020 for their Table 4 and retains the simplifying assumption that all links are link-based. In that situation, Equations (5.10) through (5.12) indicate that the PTB’s uncertainty is unchanged from its original assumed value, and every other lab’s systematic uncertainty is the RSS of its link to the PTB with the PTB’s uncertainty. Only the TW labs are shown because the systematic uncertainty of their links to the PTB are less, and so the PTB’s assumed uncertainty has a larger effect on the RSS.
Difference Between Algorithms for Circular T 384 for Labs Linked by TW
In the table, Columns 1–3 give the acronym, pre-normalization weight in UTC, and the mode whose systematic uncertainty is given in Column 4. The next three columns give the systematic uncertainties for the identified algorithms, and the last column gives the ratio of the results for the two algorithms of greatest interest. PTB is a pivot lab, to which all the TW labs are linked with the indicated uncertainties in ns. The PTB’s GPS system’s systematic uncertainty is taken to be 1.3 ns, although this is not explicitly indicated in the Circular T. The PPH2020 values for UB were computed from that work’s total and statistical uncertainties.
In the semi-historical approach, redundant links and algorithmic changes (such as the adoption of a Kalman filter) can be incorporated using the techniques shown in this paper. It would differ considerably from PPH2020 if the relative weights of the redundant links were the inverse of their statistical uncertainties (Type A), since the PPH2020 formalism, as published, effectively assigns the weights of the redundant links to be the inverse variance of their systematic uncertainties. As an illustrative example, it should make no difference whether the two parallel TW links were averaged and treated as one link, or their data treated as separate observations with the same weights as would have been used for the averaging. This would always be the case for the semi-historical or instantaneous approaches, but not generally so in the PPH2020 formalism, whose title however indicates that it is merely a first step towards introducing redundant links.
There could also be a divergence if, for any reason, a lab’s time-transfer system had to be replaced without enough information to adjust the clock predictions, though any such problems would be washed away with the next recalibration. Similar considerations apply if there is a lag in incorporating the calibrations.
A minor complication in the computations is that the BIPM has of late begun steadily increasing the Type B uncertainties over time to take into account the possibility of long-term calibration variations (Jiang et al., 2011). However, the clock predictions are not adjusted nor should they be. In that case, the cancellations due to the covariance between calibrations and clock predictions are imperfect. Because the changes in the assumed systematic uncertainties are uncorrelated with all other uncertainties, the increases should be treated as in Lewandowski et al. (2006). The total uncertainty is then the RSS of the systematic uncertainties as treated in this work, using the measured uncertainties and the systematic uncertainties with the formulas of Lewandowski et al. (2006) after replacing the total systematic uncertainties with the aging-related increase in those systematic uncertainties, and the Type A uncertainties.
Although not emphasized in this work, statistical uncertainties of past epochs lead to different values for the statistical uncertainties of UTC-UTC(k) than are computed with either the instantaneous approach or PPH2020. This is because noise from past epochs influences both the weights and the predictions. Their effects are unbounded as UTC propagates into the future, unless some look-back time is specified. Since the effect of the extant links’ noise on computed clock predictions and weights are very small due to the long time intervals used for evaluations, it may be justified to ignore all the noise except that of the last epoch in a semi-historical approach. This is the instantaneous approach, but for Type A uncertainties, it is also consistent with the philosophy of PPH2020.
7 CONCLUSION
UTC can be considered a complicated function of bias-contaminated clock, time-transfer, and astronomical data. To compute the uncertainties of UTC-UTC(k), a decision must be made as to which derivatives (biases) should be considered as having the ability to perturb UTC, and which are to be considered part of a continuous redefinition of UTC as embodied in the clock predictions and weights.
The instantaneous approach is equivalent to making all the predictions and weights of the current epoch an inflexible part of the UTC’s definition at that time, and this is what has been used by the BIPM for many years. The resulting statistics describe the distribution of corrections to UTC-UTC(k) that an omniscient observer would obtain by using data from noiseless and bias-less time-transfer links along with the BIPM’s predetermined clock predictions and weights.
If all the biases in the UTC function are considered relevant the systematic uncertainties due to initialization are extremely large, and are unbounded in future epochs. If it is decided that the only derivatives of interest are those of extant links, considerable simplification is possible since the details of the past clock prediction, weighting, and steering become irrelevant. These dependences can be limited to either the measurements of the current epoch only or limited to the measurements of all the epochs for which the current calibration was applied. Herein, these have been termed instantaneous and semi-historical, respectively.
Since all labs were linked by GPS before the UTC network was modified to make the PTB the sole pivot lab, a very simple way to compute the systematic uncertainties under the semi-historical approach is derived. The results differ from the PPH2020 algorithm’s by up to 45%. The differences could be much larger when redundant links are utilized, depending on how they are used.
In order to treat the slow increase in assumed systematic uncertainties over time, the total uncertainty should be treated as the RSS of three terms—those as computed in this work, those involving the statistical uncertainties, and those related to the post-calibration aging of the assumed systematic uncertainties, which formally appear as in Lewandowski et al. (2006, 2008) and Matsakis (2020, 2021).
HOW TO CITE THIS ARTICLE
Matsakis, D. (2023). Perspectives on the systematic (Type B) uncertainties of UTC-UTC(k). NAVIGATION, 70(2). https://doi.org/10.33012/navi.571
ACKNOWLEDGEMENTS
I thank Patrizia Tavella and Judah Levine for many helpful discussions, and am extremely grateful to Gianna Panfilo, Gerard Petit, and Aurelie Harmegnies for the countless improvements they have made to UTC over the decades.
This is an open access article under the terms of the Creative Commons Attribution License, which permits use, distribution and reproduction in any medium, provided the original work is properly cited.





{kind=link}
{kind=link}
{kind=link}
Jump to section
- Article
- Abstract
- 1 INTRODUCTION
- 2 THE UNCERTAINTY FORMULATION
- 3 A PIVOTLESS SINGLE-GNSS NETWORK IN THE SEMI-HISTORICAL APPROACH
- 4 PIVOTS WHEN ONLY EXTANT LINKS ARE CONSIDERED (SEMI-HISTORICAL)
- 5 RECALIBRATING PIVOTS AND THE SEMI-HISTORICAL APPROACH
- 6 DISCUSSION
- 7 CONCLUSION
- HOW TO CITE THIS ARTICLE
- ACKNOWLEDGEMENTS
- REFERENCES
- Figures & Data
- Supplemental
- References
- Info & Metrics
Related Articles
Cited By...
- No citing articles found.