

Abstract
Ionospheric augmentation is one of the most important dependences of PPP-RTK. Because of the dispersive features of the ionosphere, the ionospheric information is usually coupled with satellite- and receiver-related biases. This will pose a hidden trouble of inconsistent ionospheric corrections if different numbers of reference stations are involved in calculation. In this paper, we aimed at introducing a consistent regional vertical ionospheric model (RVIM) by estimating receiver biases. We first presented the inconsistent ionospheric corrections under sparse networks. Then the RVIM is compared with the International GNSS Service (IGS) final global ionospheric map (GIM) product, and the average of differences between them is 1.13 TECU. Furthermore, the slant ionospheric corrections were employed as a reference to evaluate both RVIM and GIM. The mean RMS values are 1.48 and 2.23 TECU for the RVIM and GIM, respectively. Finally, we applied the RVIM into PPP-RTK. Results indicate that the PPP-RTK with RVIM constraints achieves improvements in horizontal errors, vertical errors, and convergence time by 43.45, 29.3, and 22.6% under the 68% confidence level, compared with the conventional PPP-AR.
1 INTRODUCTION
Since the precise point positioning (PPP) technique was first proposed by Zumberge et al. (1997), it has been developed as a significant landmark in GNSS research and development. By using precise external products rather than differential observations, the PPP used herein removes the dependence of the base station(s). However, one of the limitations of PPP is the considerable convergence time required to reach a centimeter-level positioning accuracy, about 30 min or even longer (Bisnath & Gao, 2009). By fusing the flexibility of PPP and the positioning efficiency of network-based real-time kinematic (NRTK) (Zhang et al., 2019), PPP-RTK is proposed for meeting the requirement of fast convergence (see Wübbena et al. [2005]). The PPP-RTK resolves ambiguity using a standalone receiver, making it as flexible as the PPP. Furthermore, the PPP-RTK achieves rapid or instantaneous ambiguity resolution (IAR) and turns out to be comparable to NRTK.
Ionospheric augmentation is one of the most important dependences of PPP-RTK. Recently, studies have shown that the precise ionospheric correction estimated from a small- or medium-scale network helps achieve IAR and rapid convergence at the user end (Geng et al., 2011; Khodabandeh & Teunissen, 2015; Odijk et al., 2014; Teunissen et al., 2010; Zhang et al., 2011). With global ionospheric mapping (GIM) constraints added, convergence time improves significantly (Cai et al., 2017). However, the accuracy of International GNSS Service (IGS) final GIM products is limited to 2–8 total electron content units (TECUs; Rovira-Garcia et al., 2016). Banville et al. (2014) found that regional ionospheric corrections help faster convergence than global ones. Xiang et al. (2017) examined the ionospheric slant total electron content (STEC) and vertical total electron content (VTEC) constraints to the PPP model. The results showed that the positioning accuracy improved about 67% and 26% after a convergence time of 1 min. Furthermore, Psychas et al. (2018) investigated the time to first fix with the precision of various ionospheric corrections. They concluded that the faster ambiguity resolution can be achieved when ionospheric corrections are better than 5 cm (0.31 TECU).
Consistent ionospheric corrections are beneficial for user application. Because of the dispersive feature of the ionosphere, the derived ionospheric corrections are usually grouped tightly with satellite and receiver differential code biases (DCBs). For details, refer to Liu et al. (2019), Xiang & Gao (2017), and Zhang et al. (2012). At the user end, the receiver-related biases absorbed in the ionospheric corrections vary across satellites and epochs. The different receiver biases between satellites can neither be absorbed by receiver clock errors nor estimated as parameters. Luckily, they can be solved by choosing satellites observed by the same set of reference stations simultaneously. Thus, the same receiver-related biases can be estimated as parameters (Xiang et al., 2020). However, they may be epoch-varying due to the change of involved reference stations, which results in being inconsistent and may have a negative effect on the positioning solution. Inconsistent ionospheric corrections are inconvenient for interpretation, user application, and are impossible for usage between two networks. Therefore, it is critical to deal with receiver DCBs for achieving absolute and consistent ionospheric corrections.
To address the inconsistent datum, several approaches have been developed. More recently, Zha et al. (2021) added the single difference of between-station ionospheric delays as pseudo-observations so that ionospheric delays containing the same pivot receiver DCB could be estimated. They described this method within the frame of the ionosphere-weighted undifferenced and uncombined PPP-RTK model. Later, Xiang et al. (2022) proposed an approach based on single differences between satellite ionospheric constraints to avoid the effect of receiver-related biases. Psychas and Verhagen (2020) calculated the undifferenced slant ionospheric corrections with network-related biases by assuming that the satellites are observed by all reference stations. Li et al. (2021) augmented precise ionosphere and troposphere corrections supporting IAR based on multiconstellations. They also required those satellites observed by all of the reference stations simultaneously. This common satellite visibility cannot make full use of all information, thereby leading to discontinuous ionospheric corrections. In fact, it is challenging for all stations to track the same satellite, especially for a sparse and large-scale network (Li et al., 2011).
Separating the DCBs of satellites and receivers from biased ionospheric observables has been widely studied in interpreting the ionosphere. Several IGS Ionospheric Associate Analysis Centers (IAACs), such as the Center for Orbit Determination in Europe (CODE), the Jet Propulsion Laboratory (JPL), and the European Space Operations Center of European Space Agency (ESOC), estimate satellites and ground receiver DCBs simultaneously as daily constants (Choi et al., 2011; Feltens & Dow, 2006; Komjathy et al., 2005; Mannucci et al., 1998; Morton et al., 2020; Wang et al., 2020). However, the modeling is based on the commonly used smoothed geometry-free (GF) combination. Using the slant ionospheric observables from float PPP, Liu et al. (2018) modeled the vertical ionospheric information. Furthermore, the precision of derived ionospheric corrections can be improved by fixing ambiguities because of code noise and multipath effects (Ren et al., 2020).
It is difficult to obtain consistent ionospheric corrections for a sparse network. Due to the limitations of infrastructure, such as power and cabled or wireless Internet or intranet, it is costly to construct and maintain dense reference networks (Tang et al., 2013). For a sparse reference network, due to the TEC gradient and common satellite visibility, the precision and consistency of modeled ionospheric corrections are limited (Nie et al., 2019). For this reason, several researchers have explored the ionospheric models under sparse networks, mainly focusing on improving the interpolated precision. On the one hand, various interpolating functions are developed, such as spherical harmonics (Schaer, 1999), the three-shell model with bilinear spline (Mannucci et al., 1998), tomography with splines and Kriging (Orús et al., 2005), and generalized trigonometric series functions (Li et al., 2015). On the other hand, historical ionospheric information is fused to interpolate a high-quality ionospheric map (Yang et al., 2021). But these approaches concentrate more on precision, ignoring the phenomenon of inconsistent ionospheric delays when the network is sparse.
Few studies build regional ionospheric maps using high-precision ionospheric observables and focus instead on the consistent ionosphere under the sparse network, in particular for PPP-RTK. Considering the gap, a consistent and convenient method is proposed to present regional vertical ionospheric corrections under sparse networks. We mapped satellite-specific slant ionospheric corrections into the vertical direction and then represented the vertical ones using the polynomial function in real time. Even more, ionospheric coefficients and receiver biases are parameterized simultaneously to obtain consistent and unbiased real-time ionospheric corrections.
The remainder of this paper is organized as follows. The algorithm to extract slant ionospheric corrections based on the precise point positioning with ambiguity resolution (PPP-AR) model is described in detail in Section 2. The strategies of regional vertical ionospheric modeling (RVIM) and the PPP-RTK user end with ionospheric augmentation are also shown. Some experiments and results are carried out in Section 3. We compare two regional networks with different scales, with the mean interstation distance around 150 and 90 km, to emphasize inconsistent ionospheric corrections under the sparse network. Consistent regional vertical ionospheric maps under the sparse network are built and compared with CODE final GIM products. The positioning performance with consistent regional vertical ionosphere and augmented GIM is also conducted. Finally, the summaries and conclusions are drawn in Section 4.
2 METHODOLOGY
This section starts with the network end on uncalibrated phase delay (UPD) estimation and ambiguity-resolved slant ionospheric observables. Then, the model and assessment of regional vertical ionospheric delays are presented. The PPP-RTK user end with augmented RVIM is also illustrated.
2.1 PPP-RTK Network and Slant Ionospheric Observables
The raw observations on frequency i between receiver r and satellite s at a particular epoch can be expressed as follows:
 1
1
where P and L denote pseudorange and carrier-phase observations in meters, respectively, ρ is the satellite-to-receiver range, c is the speed of light in vacuum, dtr and dts are the receiver and satellite clock errors in meters, respectively, T is the tropospheric delay, I denotes the ionospheric delay,  is the wavelength of frequency j, N is the ambiguity in cycles, and
is the wavelength of frequency j, N is the ambiguity in cycles, and  and
and  are the corresponding noises, respectively. Further, br and bs are, respectively, the receiver and satellite code hardware biases, and both Br and Bs are the receiver and satellite carrier-phase hardware biases. Other corrections, such as the phase center offsets (PCOs) and variations (PCVs), phase windup, relativistic delays, the earth tide and ocean tide loading, can be precisely corrected according to existing models (Petit & Luzum, 2010; Takasu, 2013).
are the corresponding noises, respectively. Further, br and bs are, respectively, the receiver and satellite code hardware biases, and both Br and Bs are the receiver and satellite carrier-phase hardware biases. Other corrections, such as the phase center offsets (PCOs) and variations (PCVs), phase windup, relativistic delays, the earth tide and ocean tide loading, can be precisely corrected according to existing models (Petit & Luzum, 2010; Takasu, 2013).
To eliminate first-order ionospheric delays, the ionospheric-free (IF) combination is applied. The IF combination of pseudorange and phase measurements are expressed in terms of the linear combination of dual-frequency raw observations:
 2
2
where  means the wavelength of IF carrier phase,
means the wavelength of IF carrier phase,  represents the IF ambiguity, Br,IF and
represents the IF ambiguity, Br,IF and  are, respectively, the IF receiver and satellite phase hardware delay, br,IF and
are, respectively, the IF receiver and satellite phase hardware delay, br,IF and  are the IF receiver and satellite code hardware delay, respectively,
are the IF receiver and satellite code hardware delay, respectively,  and
and  are, respectively, the IF combination noises, the subscript i and j indicate combinations of different frequencies, and both αij and βij are the coefficients for the IF combination,
are, respectively, the IF combination noises, the subscript i and j indicate combinations of different frequencies, and both αij and βij are the coefficients for the IF combination,  .
.
From Equation (2), the IF float phase ambiguity parameter  can be estimated. It can be further represented as the combination of integer wide-lane (WL) ambiguity and float narrow-lane (NL) ambiguity below:
can be estimated. It can be further represented as the combination of integer wide-lane (WL) ambiguity and float narrow-lane (NL) ambiguity below:
 3
3
where  and
and  are integer WL ambiguity and float NL ambiguity, respectively.
are integer WL ambiguity and float NL ambiguity, respectively.
The float WL ambiguity can be derived from the Melbourne-Wübbena (MW) combination and fixed using a rounding strategy as follows:
 4
4
 5
5
where dr,WL and  denote, respectively, receiver and satellite WL UPDs,
denote, respectively, receiver and satellite WL UPDs,  , and [·] represents rounding to the nearest integer.
, and [·] represents rounding to the nearest integer.
With the estimated float IF ambiguity and resolved integer WL ambiguity, we can obtain the float NL ambiguity with the aid of Equation (3; Ge et al., 2008; Li et al., 2021):
 6
6
where dr,NL and  denote the receiver and satellite NL UPDs, respectively.
denote the receiver and satellite NL UPDs, respectively.  ,
,  . To separate the receiver UPDs and satellite UPDs, a constraint is added so that the UPD of a station or satellite is set to zero.
. To separate the receiver UPDs and satellite UPDs, a constraint is added so that the UPD of a station or satellite is set to zero.
Once precise satellite orbits, clocks, and UPDs are known, the WL and NL ambiguities can be resolved at reference stations. Then, the IF ambiguities can be recovered by the fixed WL and NL ambiguities and act as constraints to update the state vector. The precise slant ionospheric delays are derived using the following equation:
 7
7
where
 8
8
 is troposphere hydrostatic delay, which can be modeled with high precision through empirical models, such as the Hopfield model and the Saastamoinen model,
is troposphere hydrostatic delay, which can be modeled with high precision through empirical models, such as the Hopfield model and the Saastamoinen model,  is troposphere wet delay estimated as parameters, and both
is troposphere wet delay estimated as parameters, and both  and dr,1 are the satellite and receiver UPDs at frequency f1.
and dr,1 are the satellite and receiver UPDs at frequency f1.
It can be seen from Equation (7) that the slant ionospheric corrections are biased. It is biased by satellite DCBs, receiver DCBs, and L1 receiver UPDs at frequency f1. For convenience, the sum of the latter two parts will be called the Äô receiver bias, Äô hereafter.
2.2 Regional Vertical Ionospheric Modeling (RVIM)
To model the RVIM, we first transform an ionospheric delay to STEC through Equation (9), considering only the first-order ionospheric refraction effects.
 9
9
where  is the extracted satellite-and-station-specific slant ionospheric delay on frequency band j and STEC is the total electron content along the line-of-sight (LOS) direction.
is the extracted satellite-and-station-specific slant ionospheric delay on frequency band j and STEC is the total electron content along the line-of-sight (LOS) direction.
Plugging Equation (9) into Equation (7), we transform the unit of ionospheric corrections from meter to TECU. DCBs are in the unit of nanoseconds, while UPDs are in the unit of cycles. The transformed  is shown as follows:
is shown as follows:
 10
10
where  , and
, and  are the STECs transformed from
are the STECs transformed from  and
and  according to Equation (9).
according to Equation (9).
At the user end, the interpolated STEC absorbs receiver biases from all involved reference stations. For a clearer description, we assume that the satellite-specific interpolated STEC at the user end can be represented by the mean delays of the involved receivers. At the epoch t, there are n receivers involved in interpolation, i = 1, 2, …, n. At the next epoch, t + 1, if there are different numbers of receivers involved, inconsistent ionospheric information would occur. The interpolated STEC at epoch t can be given by:
 11
11
where the subscript u means the user station.
To generate consistent regional ionospheric corrections, we separate the receiver bias from biased ionospheric observable by mapping the STEC into VTEC under the single-layer assumption, which can be given by:
 12
12
where  . It is the zenith-angle-dependent ionosphere mapping function. Z is the zenith angle between the satellite and the receiver, and R = 6378.137 km denotes the mean Earth radius. Hion = 450 km presents the height of the thin layer referring to the GIM products, and VTECr(ϕ, λ) is the VTEC at the ionosphere pierce point (IPP), which is modeled using the first-order polynomial function to be:
. It is the zenith-angle-dependent ionosphere mapping function. Z is the zenith angle between the satellite and the receiver, and R = 6378.137 km denotes the mean Earth radius. Hion = 450 km presents the height of the thin layer referring to the GIM products, and VTECr(ϕ, λ) is the VTEC at the ionosphere pierce point (IPP), which is modeled using the first-order polynomial function to be:
 13
13
where a0 to a3 are the model coefficients to be estimated, (φ0, λ0) means the geographical latitude and longitude of the center point, (φ, λ) means the geographical latitude and longitude of IPPs,  , S is the solar hour angle, and t is the observation time.
, S is the solar hour angle, and t is the observation time.
In addition to the vertical ionospheric coefficients, receiver and satellite biases also need to be estimated. Considering that satellite DCBs are stable in the long term, they can be corrected to CODE monthly mean values. It reduces the number of parameters and enhances the model strength. Additionally, receiver biases are estimated as constants. Thus, unknown parameters are the polynomial coefficients and receiver biases. Hence, they can be estimated with the extended Kalman filter (EKF) in real time.
For clarity, we rewrite the Equation (10) as  , where
, where  . Thus, the observation model of EKF is given by:
. Thus, the observation model of EKF is given by:
 14
14
 15
15
where ω is design noise, HL is the left side of the design matrix, HR is the right side of the measurement matrix, and Im is a m * 1 dimensions vector of all ones. The measurement variance is related to the elevation.
As for the modeling residuals, an inversed distance-based weighting scheme is used to project them from reference stations to grid points. The weight of the modeling residual of the reference station r, i.e., is in the form:
 16
16
where dr is the distance between the station r and the grid point, ds is the distance between the station s and the grid point, and N is the number of stations involved in modeling.
Table 1 lists the parameters to be disseminated for the RVIM. There are five kinds of parameters: regional polynomial coefficients, residual of every grid point, the position of the central point, spatial resolution, and the reference time. Note that the number of parameters depends highly on the number of grid points and satellites.
Parameters to be Disseminated for RVIM
To assess the RVIM, the standard deviation (STD) of the difference between the modeled STEC and reference value at the user station is calculated. The reference value indicates the updated ionospheric delay after ambiguity resolution. The difference is also corrected by satellite DCBs and the rest of the receiver biases are assumed to be stable.
Let u depict the user station. Also, let  be the modeled unbiased ionospheric delay from the network. Finally, let
be the modeled unbiased ionospheric delay from the network. Finally, let  be the updated ionospheric parameters after PPP-AR regarded as a reference, and
be the updated ionospheric parameters after PPP-AR regarded as a reference, and  is the corrected difference between them, given by:
is the corrected difference between them, given by:
 17
17
2.3 PPP-RTK User End
The PPP-RTK user end is composed of three processes: uncombined PPP (UPPP), atmospheric augmentation, and ambiguity resolution. The raw dual-frequency observables at the user end with u are denoted as follows:
 18
18
Due to the rank deficiency, the estimable parameters with a tilde are biased. Interpretations can be seen in Equation (19).
 19
19
where  and du,2 are the satellite and receiver UPDs at frequency f2, which is similar to Equation (8).
and du,2 are the satellite and receiver UPDs at frequency f2, which is similar to Equation (8).
The PPP-RTK network provides absolute ionospheric corrections derived from RVIM, troposphere wet corrections, and UPDs at each frequency. Satellite clock and DCBs are corrected using products from IGS analysis centers. The satellite specific corrections are  .
.
Satellite clock, UPDs, and DCBs are corrected at the observables, while precise atmospheric corrections act as constraints. The corrected observations are rewritten as follows:
 20
20
where  is the modeled tropospheric correction from the network at the user station,
is the modeled tropospheric correction from the network at the user station,  is the modeled ionospheric correction from RVIM at the user station, and
is the modeled ionospheric correction from RVIM at the user station, and  is the single difference between the reference satellite p and s.
is the single difference between the reference satellite p and s.
Ionospheric prior information contributes to the fast convergence of parameters and the subsequent ambiguity resolution. The RVIM corrections are free of satellite and receiver biases and there are two approaches to apply the ionospheric constraints. On the one hand, the RVIM acts as an external constraint so that receiver DCBs and unbiased ionospheric parameters can be estimated (Zhou et al., 2020). On the other hand, between-satellite single-differenced ionospheric corrections can also be used as constraints, while the estimable ionospheric parameters are coupled with receiver DCBs. In this study, the single-differenced strategy for fewer parameters is adopted and the ionosphere-constrained model is given.
 21
21
 22
22
where z+ is the augmented measurement vector, R+ is the corresponding augmented variance, z is the measurements, R is the measurement variance,  and P0 are the single-difference ionospheric constraints and their variance, respectively, RMSRVIM is the root-mean-square (RMS) interpolated from the RVIM, H is the design matrix, H0 here is the single-difference design matrix, x is the state vector, v is the measurement error, and v0 is the residual of the prior information.
and P0 are the single-difference ionospheric constraints and their variance, respectively, RMSRVIM is the root-mean-square (RMS) interpolated from the RVIM, H is the design matrix, H0 here is the single-difference design matrix, x is the state vector, v is the measurement error, and v0 is the residual of the prior information.
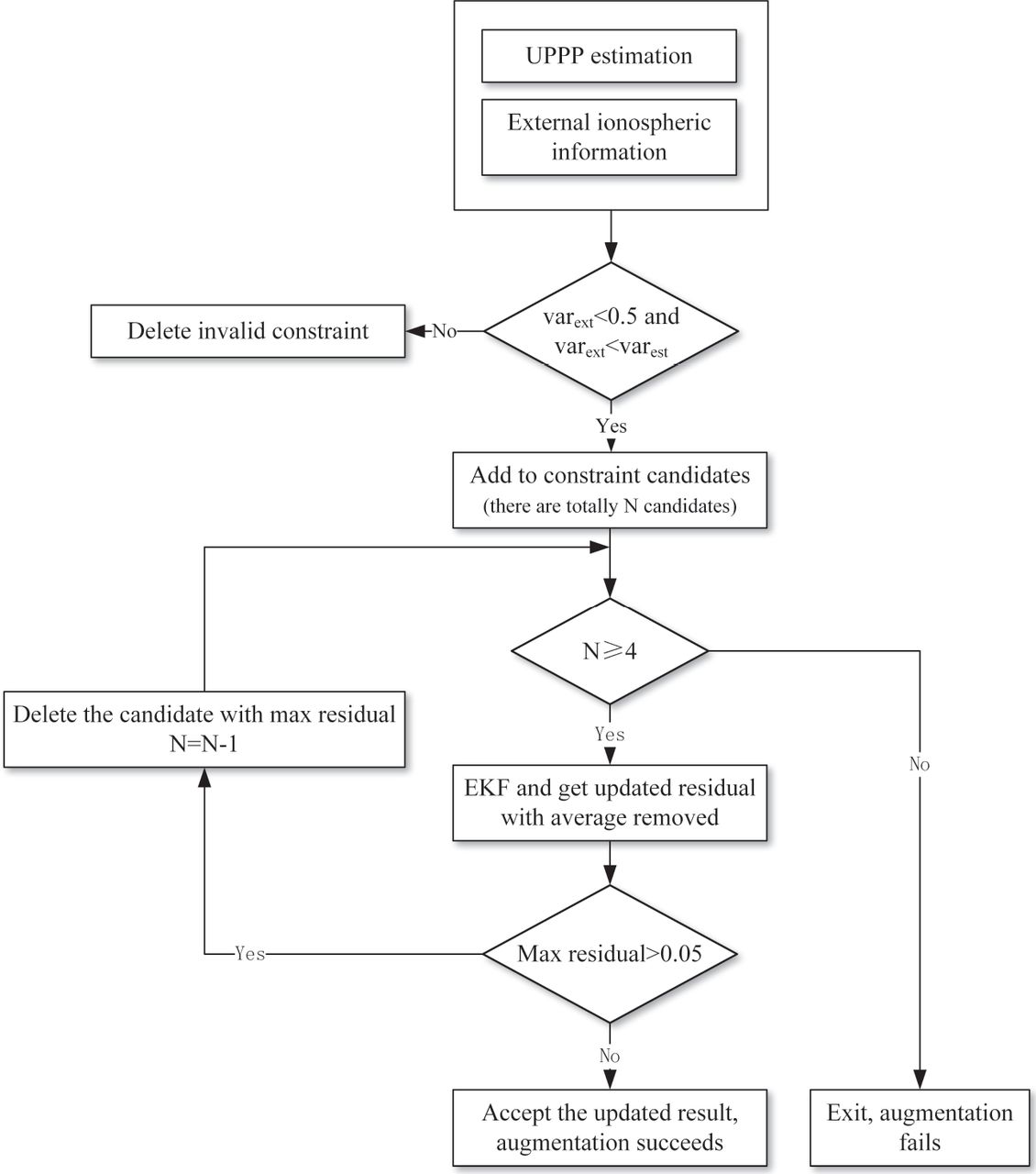
The flowchart to augment ionospheric corrections is described in Figure 1. We carry out quality control before applying all the ionospheric corrections. It should be noted that the ionospheric corrections are not effective all the time. The basic idea of quality control is to make sure that the RVIM constraints are reliable enough and more precise than the estimated ionospheric parameters. First, we select the valid ionospheric constraints meeting the requirements of small residual and variance as candidates. Then, an iterative filter is run to validate that the ionospheric constraints are consistent. Outliers are removed during the filter. Lastly, the augmented results are obtained by accepting valid ionospheric constraints. As we focus on the ionospheric constraints, strategies of augmenting the troposphere and fixing ambiguity resolution are not detailed.

Flowchart of ionospheric augmentation in PPP-RTK user end; varext is the variant of external ionospheric corrections, varest is the variant of estimated ionospheric parameters, and N is the number of constraints.
3 RESULTS AND ANALYSIS
First, the data set and processing strategy for the experiments are described. Then the inconsistent and consistent ionospheric corrections are presented and analyzed. Comparisons between RVIM and CODE final GIM is also examined. Finally, the positioning performance with ionospheric augmentations is shown.
3.1 Data Set and Processing Strategy
In this study, GPS dual-frequency observations with a 30-s sampling rate from the National Oceanic and Atmospheric Administration (NOAA) Continuous Operational Reference System (CORS) Network (NCN) on March 16, 2015, are selected. A total of 30 stations are involved in the UPD calculation, and the geographic distribution is shown in Figure 2.

Geographic distribution of selected stations for UPD estimation
Two reference networks with different scales are used to extract ionospheric corrections and validate the augmentation performance. As shown in Figure 3(a), Networks A and B are composed of nine reference stations, respectively, with the mean interstation distance approximately 150 km and 90 km. It is worth noting that chil is involved in two reference networks. Nine user stations are utilized to assess the consistent regional vertical ionospheric corrections extracted from these two networks in Sections 3.4 and 3.5. The geographic distribution is shown in Figure 3(b).
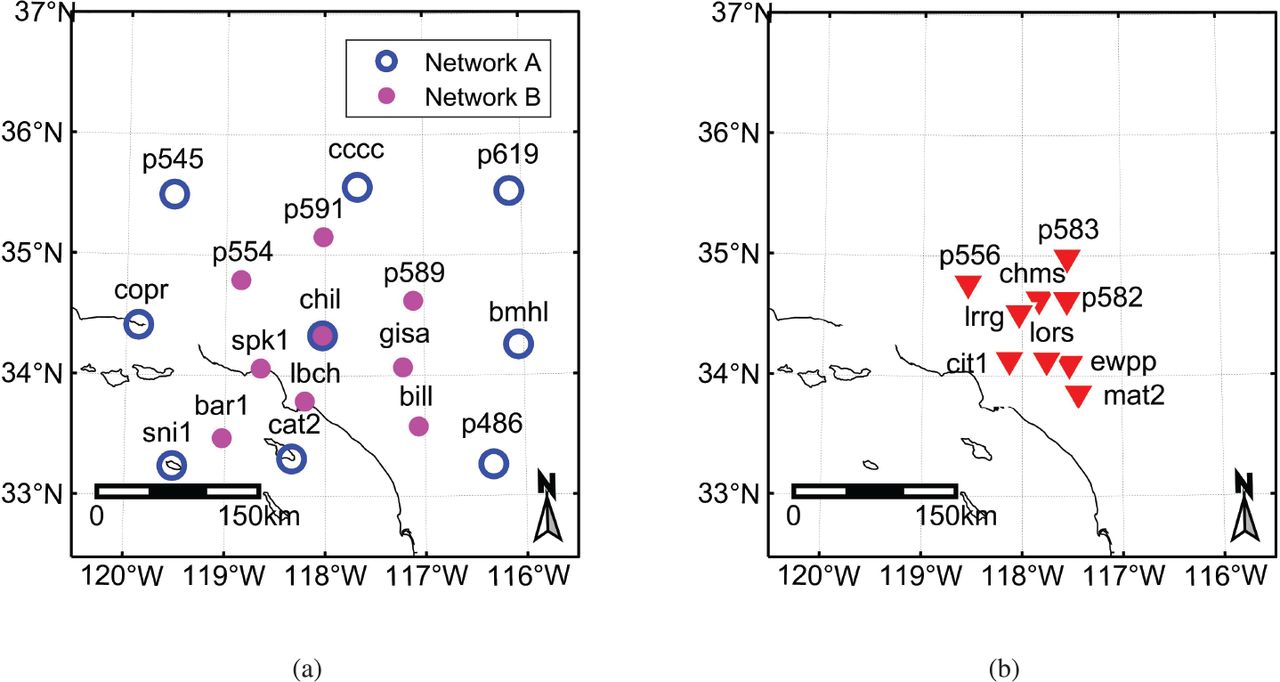
Geographic distribution of (a) two networks and (b) user stations
The detailed data processing strategies are listed in Table 2. We fixed the station coordinates based on the IF combination in the PPP-RTK network processing. During the VTEC modeling, ionospheric coefficients and receiver biases are reinitialized if historical states are absent longer than 5 min. At the user end, pseudokinematic UPPP experiments are conducted.
Data Processing Strategies Used in This Study.
3.2 Inconsistent Regional Slant Ionospheric Corrections
In this section, we only select satellites that are observed simultaneously by the same set of reference stations to transmit ionospheric corrections. The number of transmitted satellites and involved stations is a trade-off. To ensure the modeling quality in the region, we keep the number of stations steady as much as possible. Common satellite visibility ensures the same modeled receiver bias between satellites, but it is inconsistent between adjacent epochs due to the variety of involved stations.
Since common visibility is greatly affected by the scale of networks, we choose two networks in different scales for validation. The ionospheric difference and the number of involved stations at cit1 are presented in Figure 4. Note that the information in the first hour is deleted to ensure the quality of UPD, as is the case for the following experiments. Ionospheric difference indicates the difference between the interpolated delays and the updated ionospheric estimation after ambiguity resolution, which is regarded as the reference. It can be seen that not all of the reference stations are involved all the time because of failed tracking or unsuccessful ambiguity resolution. Moreover, the number of valid stations in Network A changes frequently, mainly concentrated on numbers 8 and 9. In contrast, Network B is more stable; since nearly all stations are valid, it is easier to track the same satellite in a dense network. As for the ionospheric difference, there are obvious segments in both networks and they are accomplished by the change of involved stations. Therefore, the different receiver biases will lead to inconsistencies and make it inefficient for application.
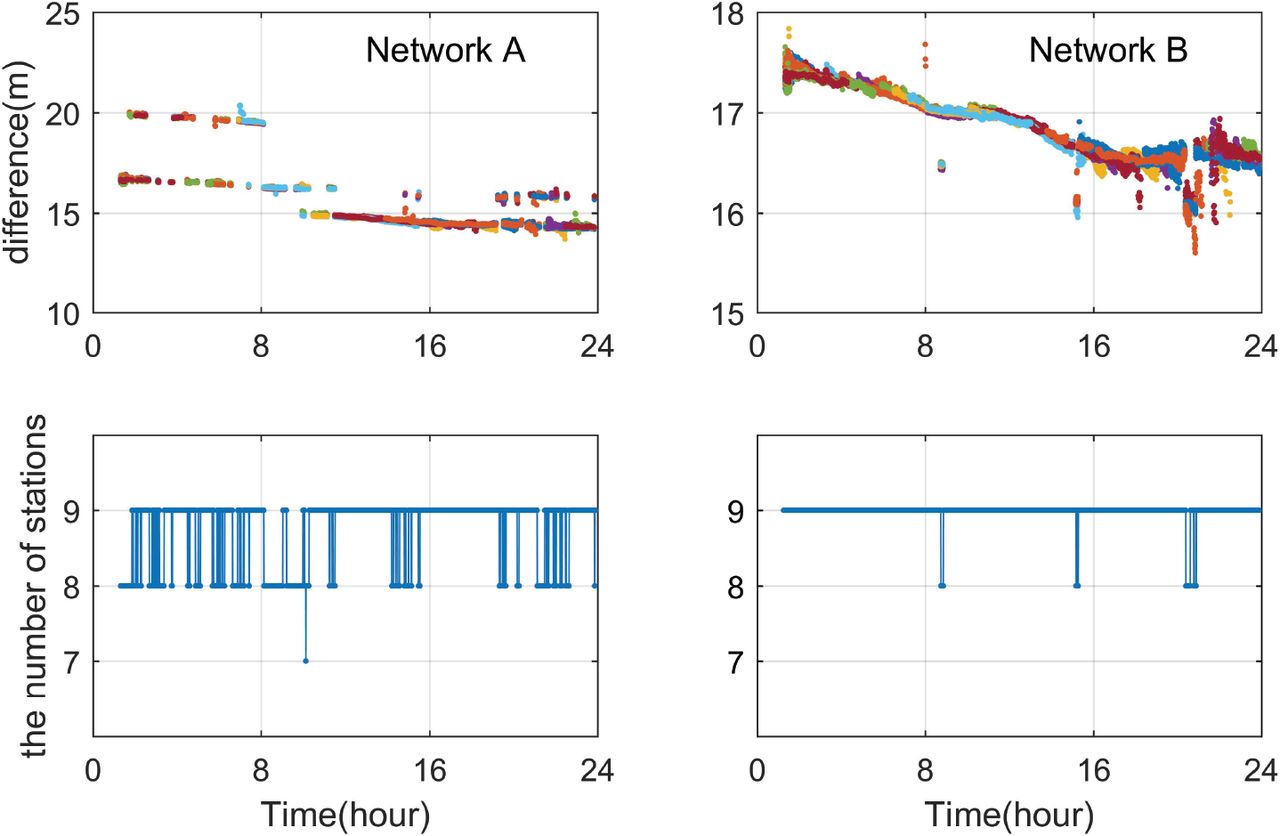
Ionosphere error between user and network (the upper panel); the number of stations involved in interpolation (the lower panel)
3.3 Consistent Regional Vertical Ionospheric Corrections
As mentioned previously, the interpolated slant ionospheric corrections are lumped with satellite and receiver biases, thereby leading to an inconsistency. To generate consistent corrections, we map the STEC into VTEC and isolate receiver DCBs using an EKF. The ionospheric coefficients and receiver biases (regarded as constants) are estimated in real time. Figure 5 gives the time series of estimated receiver biases for 17 reference stations, including the reference stations in Network A and Network B, in which average values are removed for a better presentation. It shows an obvious convergence process during 0–4 h and finally keeps stable at 1 ns around the average values.

Time series of the estimated receiver DCBs (average removed, different colors represent different receivers)
Figure 6 exhibits the estimated polynomial coefficients of RVIM from two networks in which the estimated coefficients are similar. a0, which indicates the average ionospheric delays of the region, changes significantly and is highly time-dependent. To be specific, it stays low and quiet during 4–14 h (21:00-7:00 UTC/GMT −7 hours). Then it shows an upward trend and reaches the peak at 20 h (13:00 UTC/GMT −7 hours), followed by a decrease. Considering the characteristic of the ionosphere during the day, it is quiet at midnight and active during the day, the time of maximum ionization occurs near noon (Klobuchar, 1987; Schafer & Goodall, 1933). a1, a2, and a3 represent the ionospheric gradient along latitude, longitude, and two dimensions, respectively. It is readily observed that the level of a1 is much larger than a2, which means that latitude has a more significant effect on ionospheric variation.
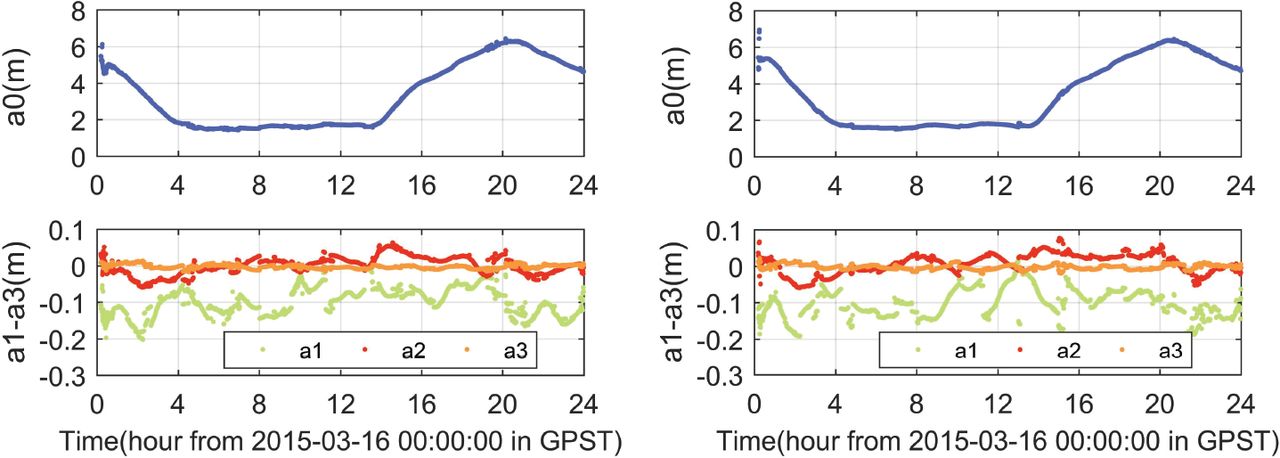
The estimated polynomial coefficients of the RVIM from Network A (left) and Network B (right)
To assess the accuracy of RVIM, the ionosphere error with satellite DCBs corrected from the CODE product is evaluated. The STD of ionosphere error is calculated with the assumption that receiver biases are constants. Figure 7 shows the ionosphere error at cit1 for two networks with the average removed, in which different colors represent different satellites. Compared with the network-derived slant ionospheric model, the vertical model is continuous and consistent between adjacent epochs since receiver biases are separated. The STD values are 0.23 and 0.25 m in Network A and Network B, respectively. Although the scale of Network B is much smaller, the STD values show no significant difference. This reflects that the regional vertical ionospheric modeling is insensitive to the density of the reference networks. It also means that the mapping errors and the modeling errors have a greater influence on the accuracy of the vertical ionospheric modeling.
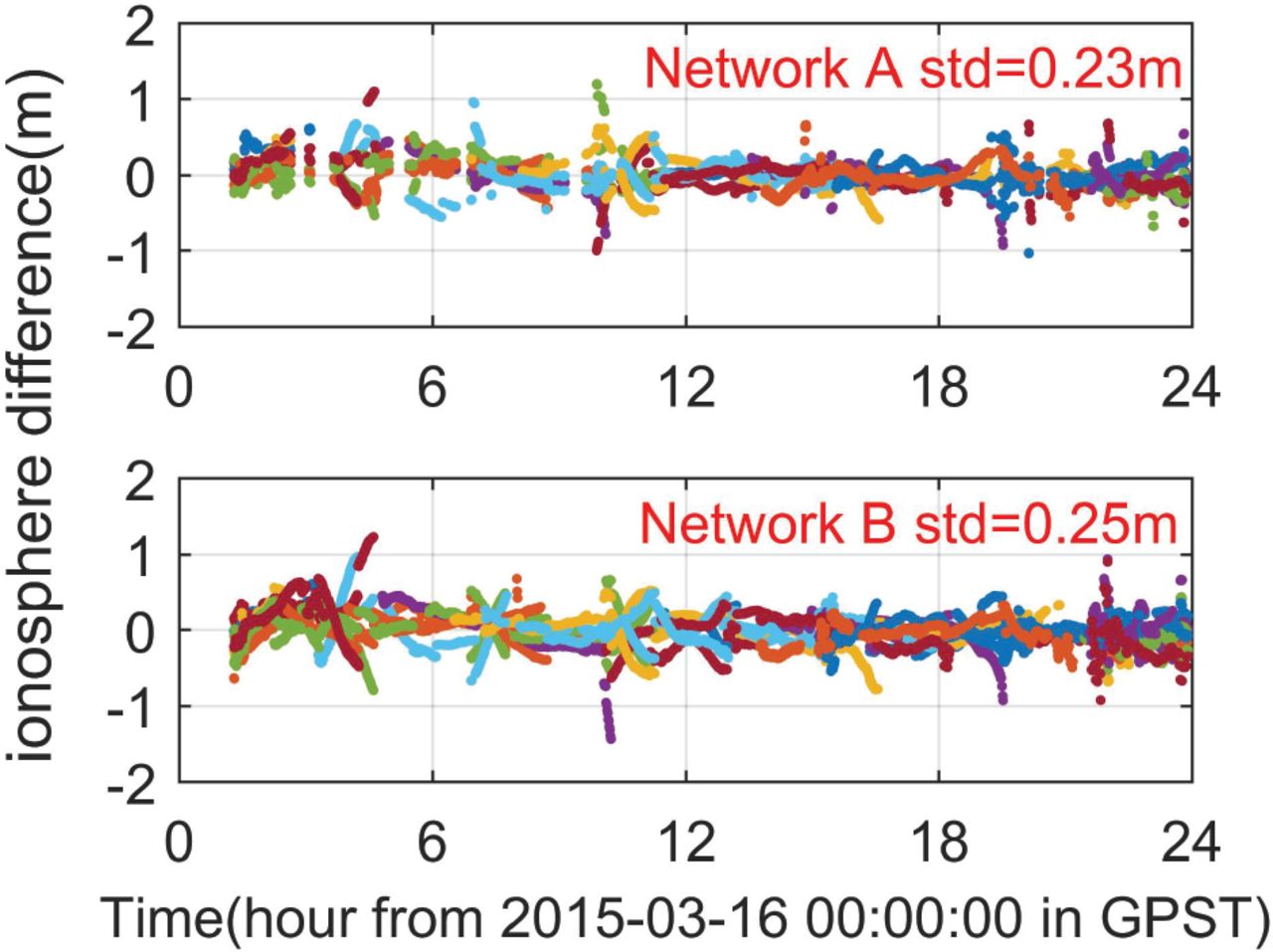
The accuracy of RVIM in Network A (the upper panel) and Network B (the lower panel), different colors represent different satellites
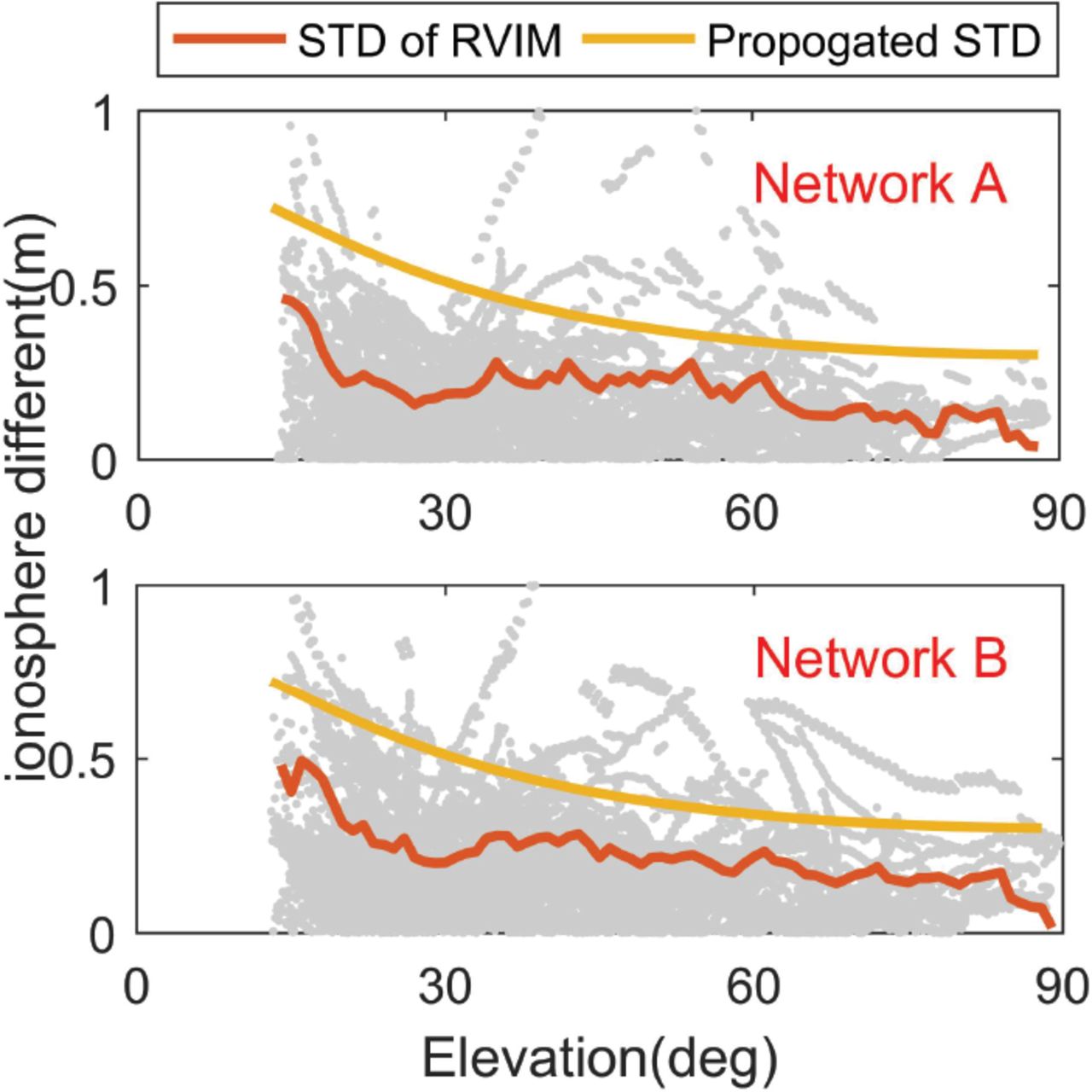
Further, we investigate the relationship between the STDs interpolated from the RVIM and derived from the variance propagation law. In Figure 8, the ionosphere differences of all satellites are plotted in grey and the STDs are highlighted in orange lines. Yellow lines represent the empirical STDs in Equation (22), where RMSRVIM = 0.3. It is readily observed that these two STDs show a consistent trend of improved accuracy as the elevation increases.

The relationship between the STDs interpolated from the RVIM and derived from the variance propagation law
3.4 Evaluation of the RVIM
Regional vertical ionospheric maps can be generated using transmitted RVIM parameters. Figure 9 shows regional vertical ionospheric maps at a height of 450 km on March 16, 2015, with a spatial resolution of 0.1° latitude by 0.1° longitude and a time interval of 3 hours. Considering that the accuracies of RVIM based on two networks are verified to be close and Network A covers a wider region, we only assess the RVIM extracted from Network A. The average value of the regional VTEC has been subtracted from the raw map to clearly show the horizontal ionospheric variation. It can be observed that VTEC values at lower latitudes are larger than those at higher latitudes. To further validate the precision of RVIM, we compare it with the CODE final GIM product (shown every 3 h). It is a postprocessed product using approximately 290 globally distributed stations. Similar to the RVIM maps, GIM products in the same region are shown in Figure 10. The TEC values inside grid points are calculated by means of bilinear interpolation.

The RVIM map (unit: TECU) on March 16, 2015, every 3 hours: The average value of the regional VTEC has been subtracted from the raw map and marked in parentheses.

The GIM (unit: TECU) on March 16, 2015, every 3 hours: The average value of the regional VTEC has been subtracted from the raw map and marked in parentheses.
The difference between RVIM and GIM is shown in Figure 11. There exist systematical biases because RVIM is generated from regional solutions and GIM are obtained from global solutions. Furthermore, CODE final GIM products have an accuracy of only 2–8 TECU (Hernández-Pajares et al., 2009). The mean difference between RVIM and GIM is 1.13 TECU, which shows good consistency.

Differences between the RVIM and GIM (unit: TECU) on March 16, 2015, every 3 hours: The average value has been subtracted from the raw map and marked in parentheses.
In addition to the VTEC, STECs modeled from RVIM and GIM are also validated. By selecting the slant ionospheric observables at user ends as a reference, we evaluate the performance of the RVIM and GIM. As the ionospheric observables are biased by receiver-related biases, the single difference of between-satellite ionosphere observables is adopted. Figure 12 illustrates the RMS of STEC of nine user stations for the RVIM and GIM, respectively. We can see that the RMS value of the RVIM method is smaller than the GIM for all stations. The mean RMS values are 1.48 and 2.23 TECU for the RVIM and GIM, respectively, which shows the superiority of the proposed RVIM method.

RMS of STEC for the RVIM and GIM methods evaluated by the ionospheric observables at user ends
3.5 Positioning Performance
The quality of RVIM has been assessed using reference values and the GIM previously. Furthermore, the positioning performance with RVIM and GIM augmented in terms of positioning accuracy and convergence time is evaluated. Four PPP schemes are experimented, including the conventional unconstrained PPP with ambiguity resolution (PPP-AR), PPP-RTK constrained with RVIM extracted from Network A (PPP-RVIM[A]), PPP-RTK constrained with RVIM extracted from Network B (PPP-RVIM[B]), and PPP-RTK constrained with GIM (PPP-GIM). We use nine user stations to test and simulate interruptions every 2 hours and obtain a total of 99 sessions. The solutions during 00:00:00-02:00:00 are discarded due to the lack of complete ionospheric corrections. In addition, we regard daily static PPP solutions as reference coordinates.
Figure 13 shows, over a 2-h convergence period, the mean positioning errors of 99 sessions for PPP-AR, PPP-RVIM(A), PPP-RVIM(B), and PPP-GIM models. From the left and right are the horizontal and vertical directions. Table 3 presents the 68% and 95% confidence levels of errors and convergence time. The convergence referred to the positioning accuracy is better than 0.3 m in both horizontal and vertical in 20 consecutive epochs (Jokinen et al., 2011; Li & Zhang, 2014).

The mean positioning errors of PPP-AR, PPP-RVIM(A), PPP-RVIM(B), and PPP-GIM
Statistics for Positioning Performance of PPP-AR, PPP-RVIM(A), PPP-RVIM(B), and PPP-GIM
As can be seen from Figure 13 and Table 3, the external ionospheric information helps faster ambiguity resolution in both horizontal and vertical directions. Additionally, the improvement is more significant with more accurate ionospheric constraints added. The solutions with RVIM extracted from Network A and Network B are close because of the similar precision of two ionospheric models. Hence, we assess the average values for clarity. Compared with the GIM, the RVIM shows a faster convergence. It takes about 7 (54.8%) and 16.75 min (43.25%) to converge under 68% and 95% confidence levels, respectively, with regional ionospheric corrections constrained, while it shows a longer convergence time at 12 (22.6%) and 21.5 min (27.1%) for PPP-GIM. The positioning errors for horizontal and vertical components are reduced from 0.173 to 0.098 m (43.35%) and from 0.232 to 0.164 m (29.3%) when the RVIM is added under a 68% confidence level. The results are 0.2075 (38.95%) and 0.2915 (25.05%) m under a 95% confidence level. However, the improvements of positioning errors are less than 20% for PPP-GIM, which is not as significant as the regional constraints.
4 CONCLUSION
It is challenging to generate consistent regional ionospheric corrections due to receiver-related biases. Inconsistent ionospheric corrections are inconvenient for interpretation and user application, and impossible for usage between two networks. In this paper, a model for consistent regional vertical ionospheric corrections under sparse networks was developed. With integer ambiguity resolved, the precise slant ionospheric observables were extracted. Then, the slant ionospheric delays were mapped into the vertical direction and represented as polynomial coefficients, while receiver biases were estimated as constants in real time. Separating receiver biases, users can retrieve consistent regional ionospheric corrections efficiently for achieving faster PPP-RTK.
The GPS observation data of the NOAA network on March 16, 2015, were selected to validate the performance of RVIM. Additionally, two different scale networks were applied to model the regional ionospheric corrections, with interstation distances of about 150 and 90 km. Slant ionospheric delays interpolated from two networks were validated. The results indicate that the inconsistency of interpolated slant ionospheric delays is common under the sparse network. However, with receiver biases estimated, retrieved regional vertical ionospheric corrections from the RVIM model stay consistent. The STDs of these two networks are similar at 0.23 and 0.25 m, reflecting that the mapping errors and modeling errors have a greater influence on the accuracy of the vertical ionospheric modeling.
To assess the precision of RVIM, the CODE final GIM is taken as a reference. The average RMS of VTEC differences is 1.13 TECU. Additionally, STECs retrieved from the RVIM model and the GIM are also validated through the single difference of between-satellite ionospheric observables at user ends, and mean RMS values are 1.48 TECU and 2.23 TECU, respectively. Indeed, all these show the superiority of the proposed RVIM method. Meanwhile, we also assessed the RVIM in the positioning domain. The results reveal that the regional ionospheric corrections are more effective than the GIM in positioning accuracy and convergence time. Compared with PPP-AR, the PPP-RTK with RVIM constraints achieves improvement in horizontal errors, vertical errors, and convergence time by 43.45, 29.3, and 22.6%, respectively, under a 68% confidence level, while for a 95% confidence level, they are 38.95, 25.05, and 27.1%, respectively.
The research shows that mapping ionospheric delays into the vertical direction for obtaining consistent ionospheric corrections is effective, especially under sparse networks. Consistent ionospheric corrections make it efficient for user interpolation. However, because of mapping and modeling errors, the external ionospheric information is at the decimeter level. Further studies on consistent slant ionospheric corrections are needed to improve the accuracy of ionospheric corrections.
HOW TO CITE THIS ARTICLE
Lyu, S., Xiang, Y., Tang, T., Pei, L., Yu, W., & Truong, T. -K. (2023). A consistent regional vertical ionospheric model and application in PPP-RTK under sparse networks. NAVIGATION, 70(3). https://doi.org/10.33012/navi.568
ACKNOWLEDGMENTS
GNSS observation data are provided by the National Oceanic and Atmospheric Administration (NOAA), https://geodesy.noaa.gov/corsdata/. Satellite products are provided by International GNSS Service (IGS), https://cddis.nasa.gov/archive/gnss/products/. We also thank the National Key R&D Program of China (No. 2021YFB3901301), Shanghai Pujiang Program (20PJ1409200), and Shanghai Science and Technology Committee under Grant (20511103103) for the support received.
This is an open access article under the terms of the Creative Commons Attribution License, which permits use, distribution and reproduction in any medium, provided the original work is properly cited.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Jump to section
Related Articles
Cited By...
- No citing articles found.