

Article Figures & Data
Figures
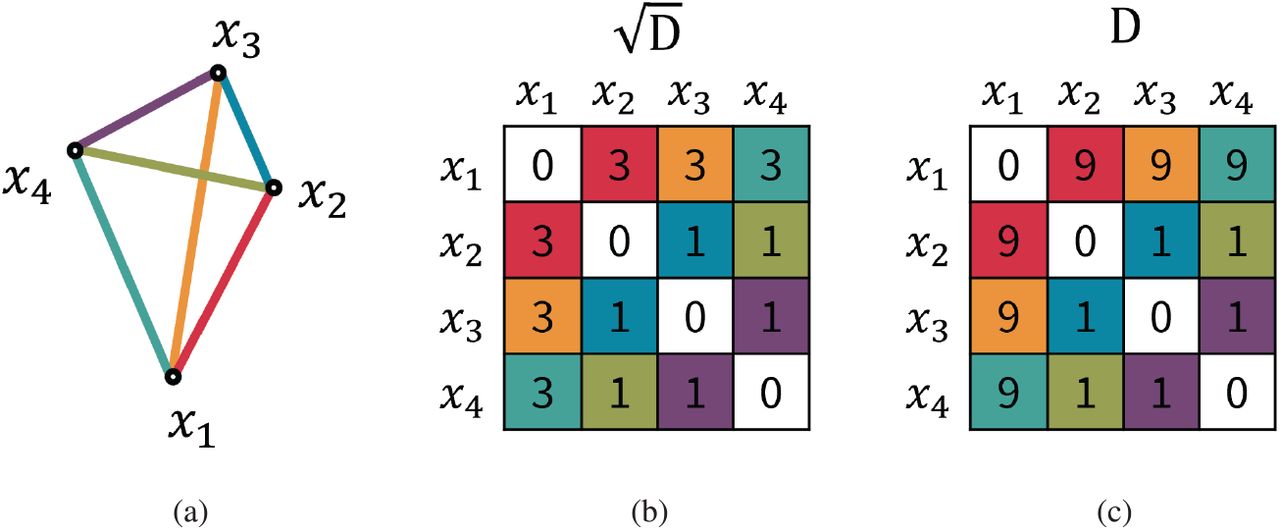
- FIGURE 1
Visualization of how relative distances between points are used to construct a Euclidean distance matrix (EDM): subfigure (a) shows a fully connected point configuration, subfigure (b) is the matrix
 , and subfigure (c) is the Euclidean distance matrix, D.
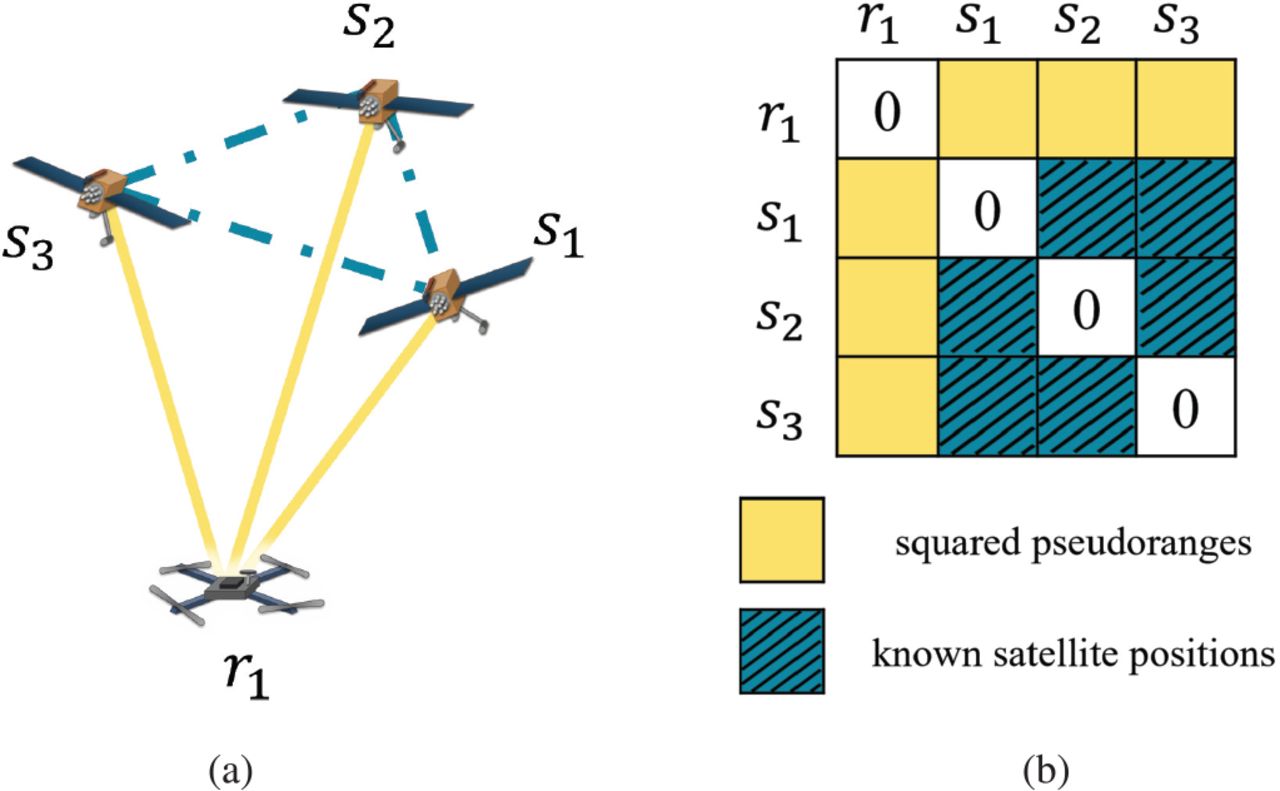
, and subfigure (c) is the Euclidean distance matrix, D. - FIGURE 2
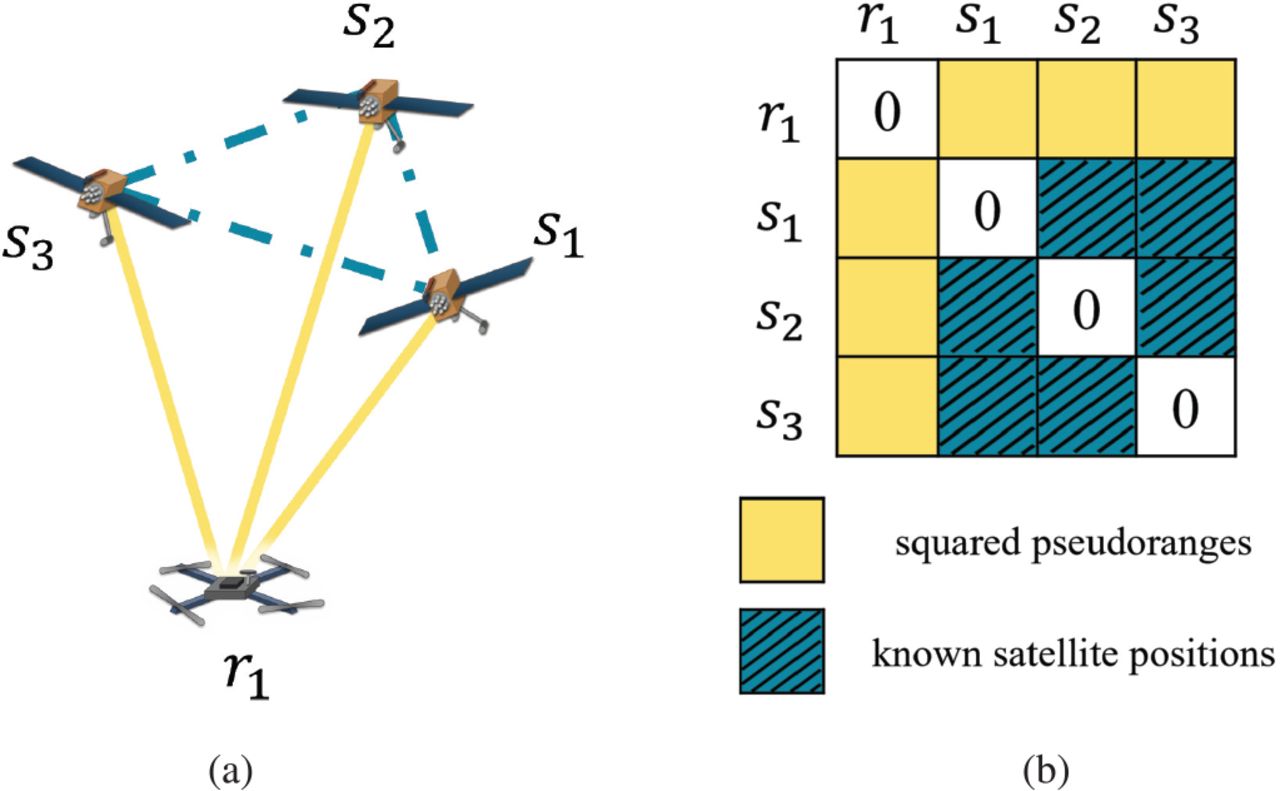
A combination of squared pseudoranges and known satellite positions are used to construct the EDM shown in subfigure (b) for a single receiver and for multiple satellites in subfigure (a).
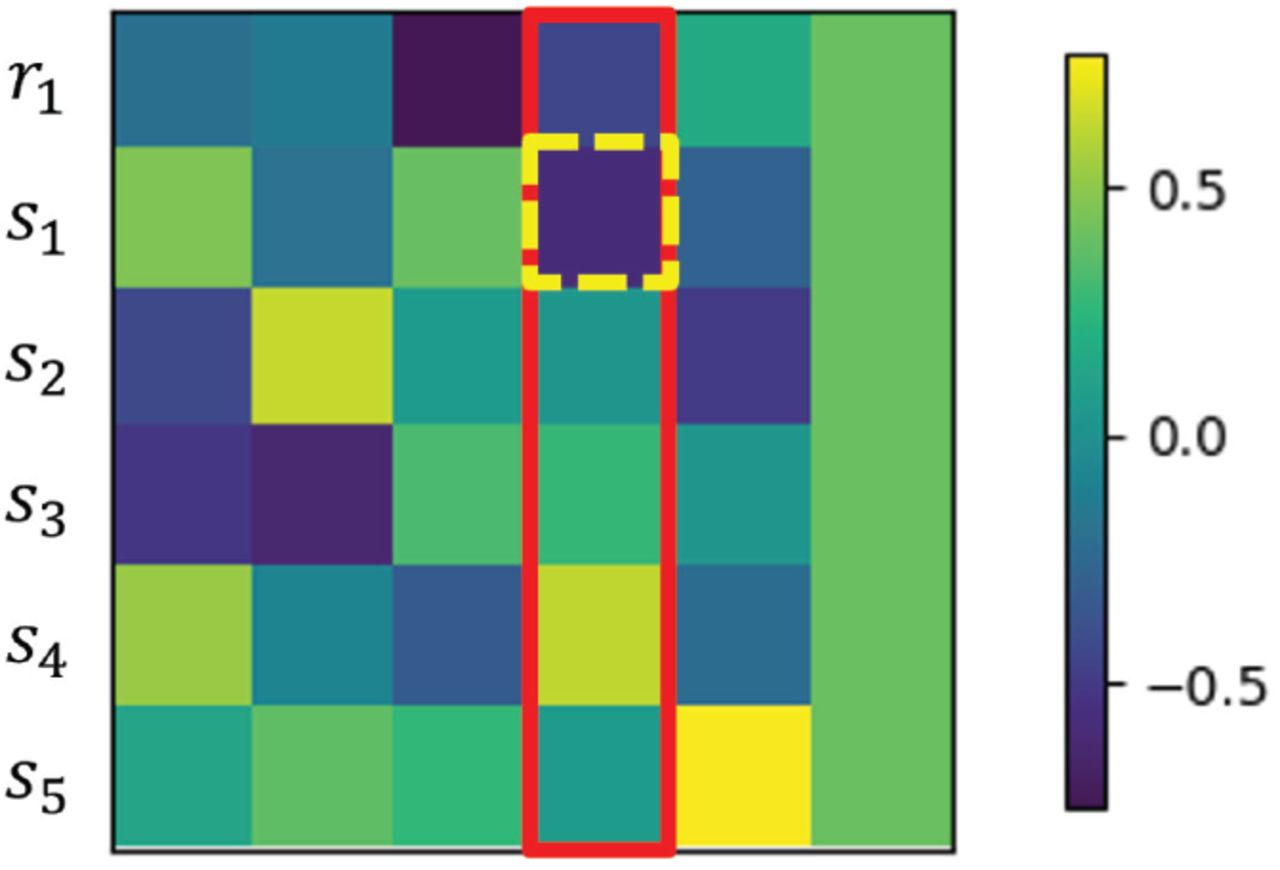
- FIGURE 3
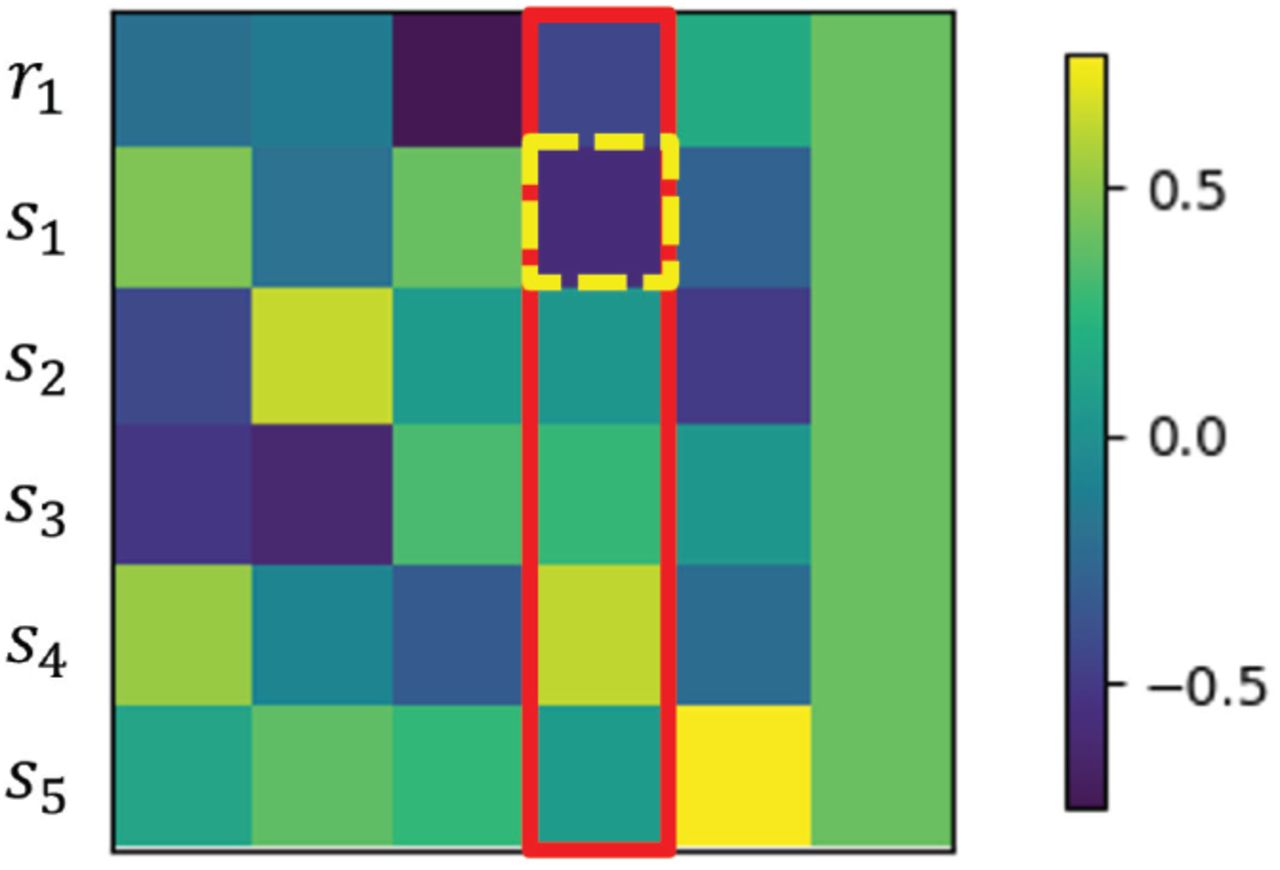
The left singular vectors, U, of Gc with u4 is highlighted in red while U24 is highlighted in dashed yellow and is the maximum absolute value in the column indicating a fault from the s1 measurement.
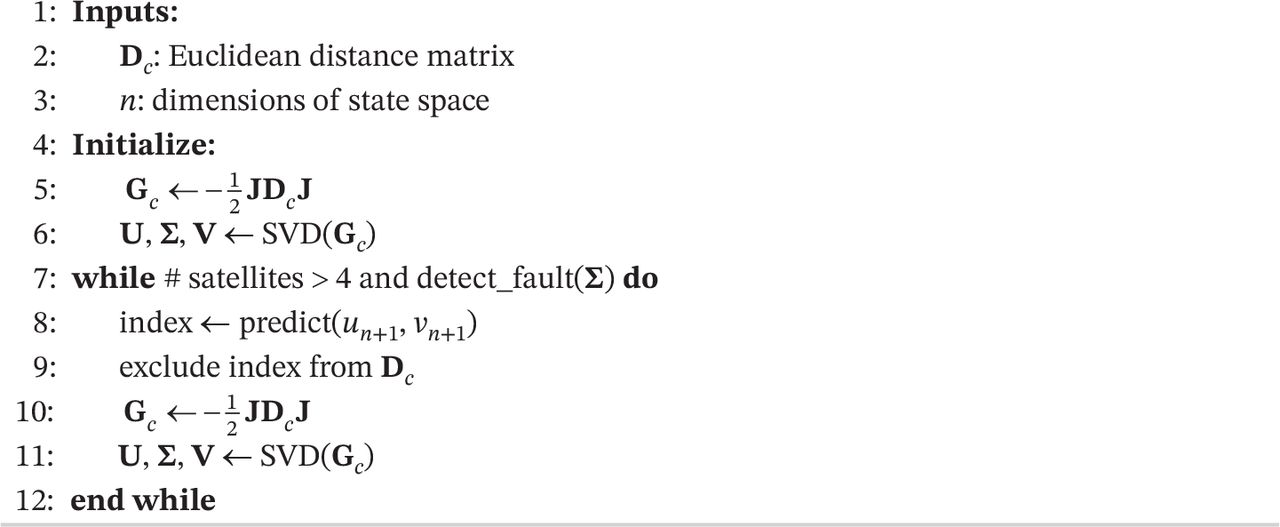
- ALGORITHM 1
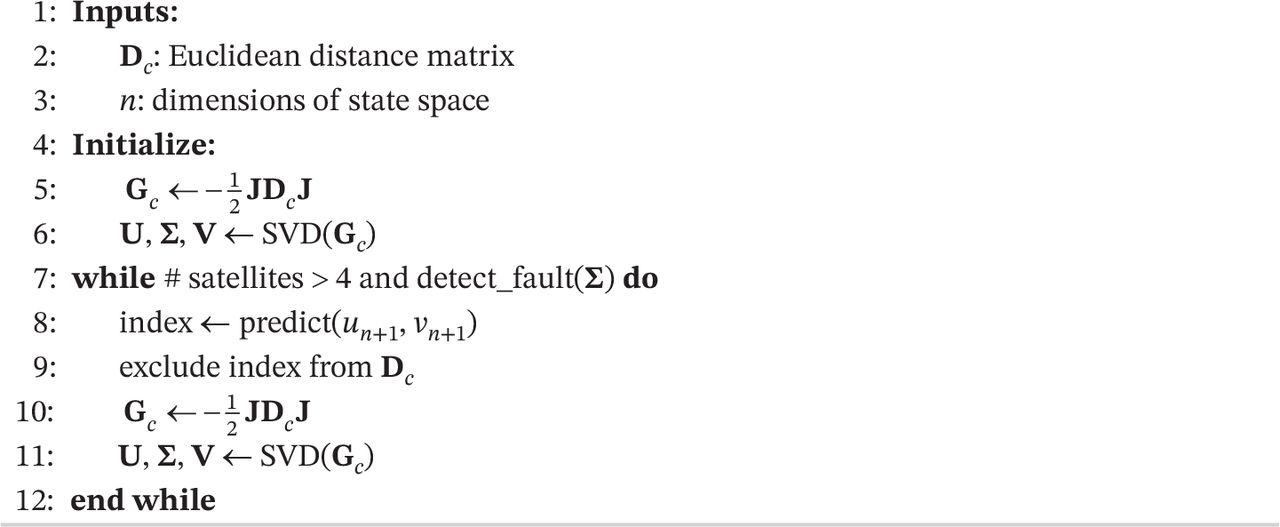
EDM-Based FDE
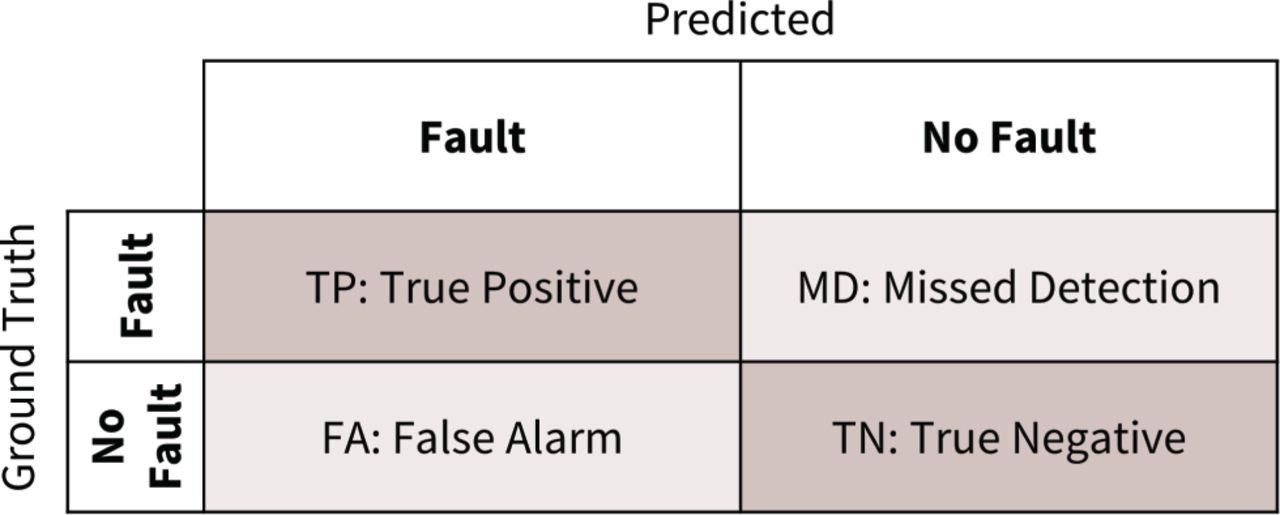
- FIGURE 4
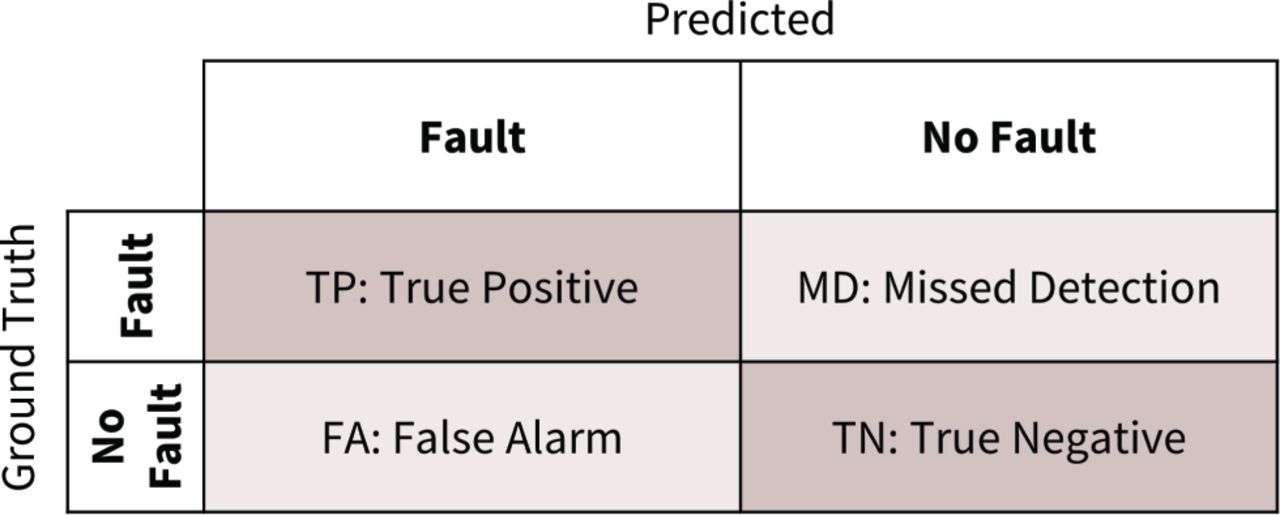
This confusion matrix depicts the relationship between the ground truth fault status of measurements and the measurement fault status as predicted by each FDE method.
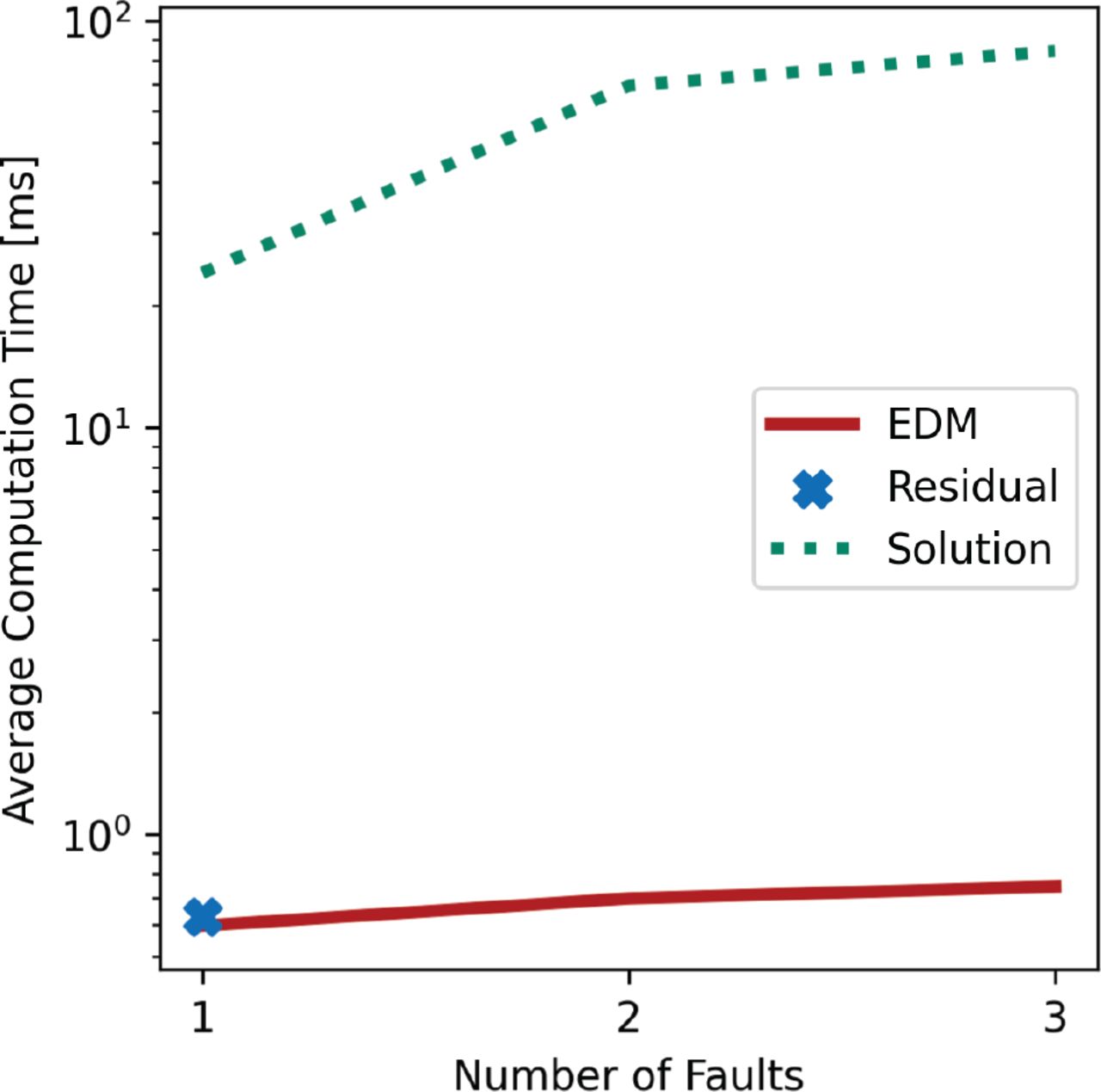
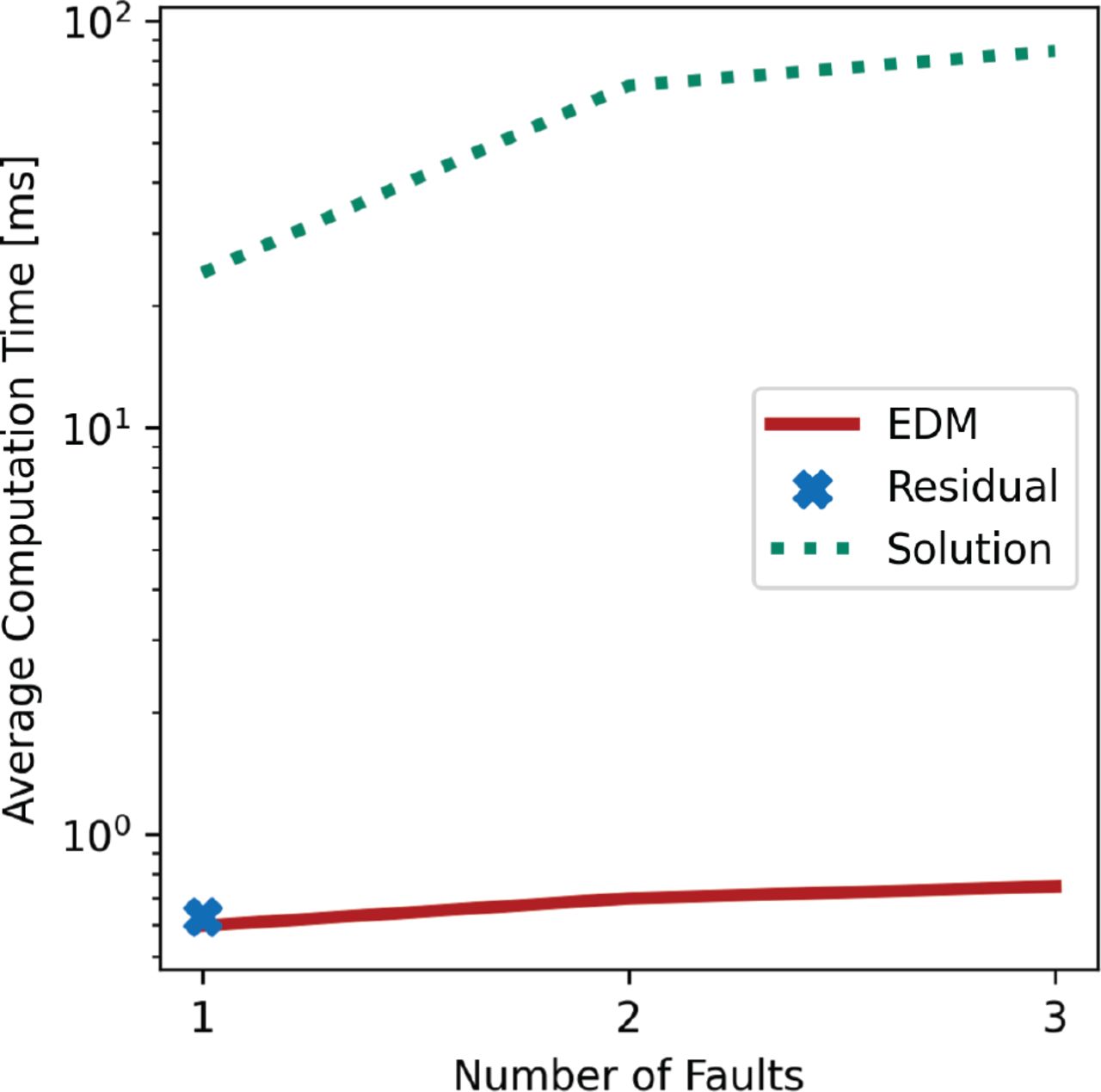
- FIGURE 5
Average computation time of each FDE method with an increasing number of faults hypothesized; the computation time of EDM-based FDE increases more slowly than solution separation as the number of faults hypothesized increases.
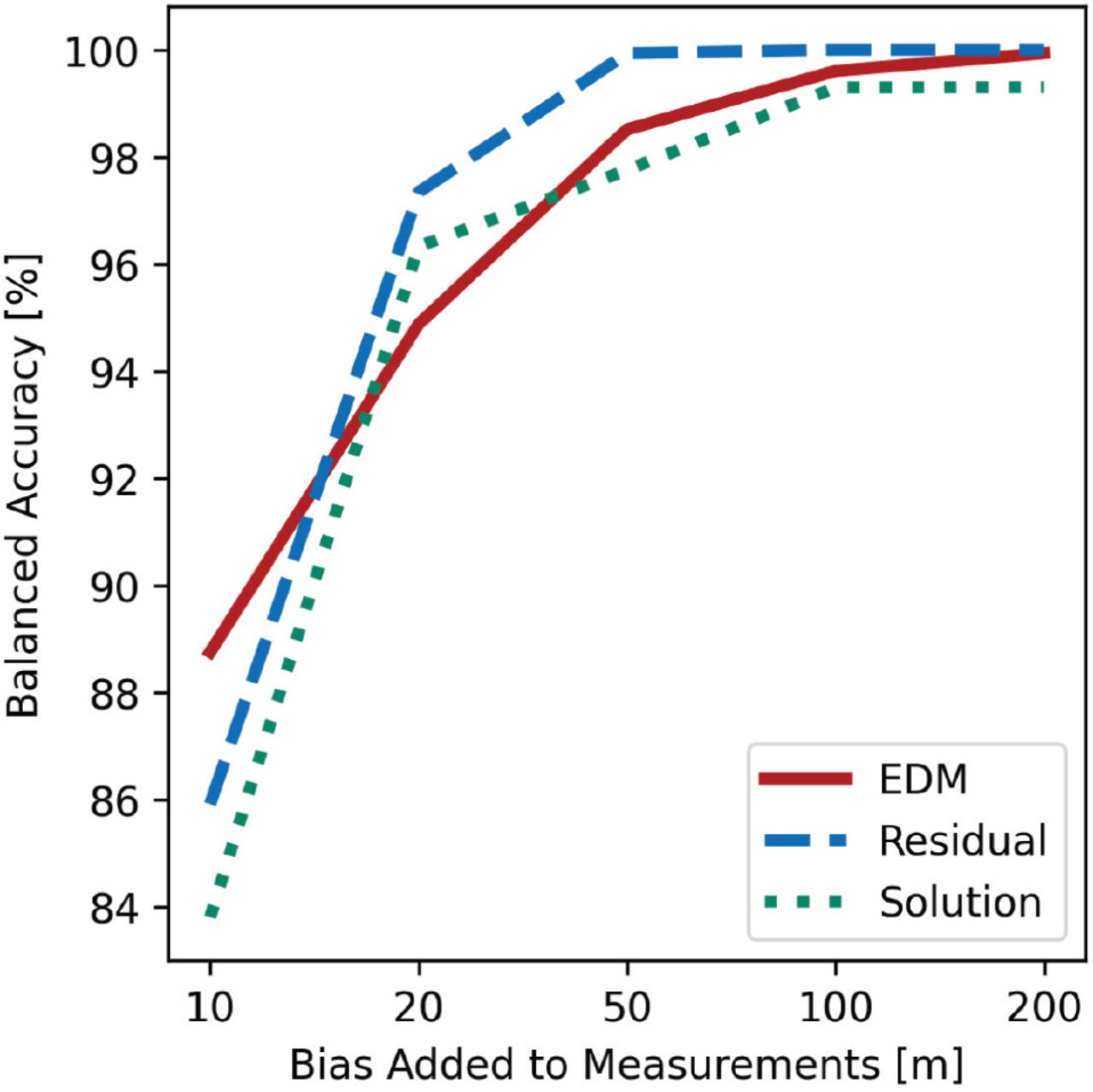
- FIGURE 6
Balanced accuracy (see Equation [9]) with respect to the magnitude of the faults added shows that EDM-based FDE rivals the balanced accuracy of the other two FDE methods with large magnitude biases excelling at low bias magnitudes.
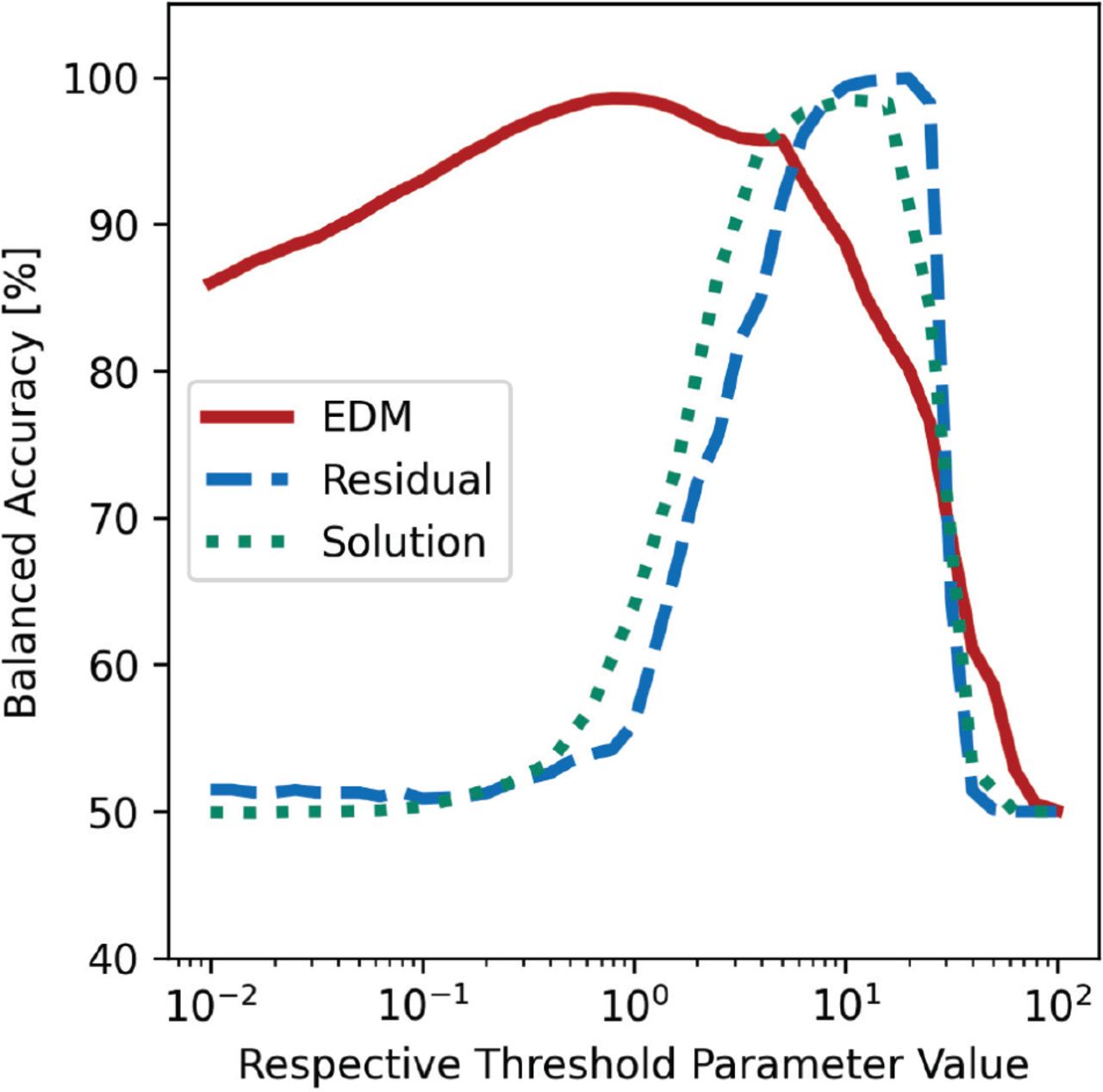
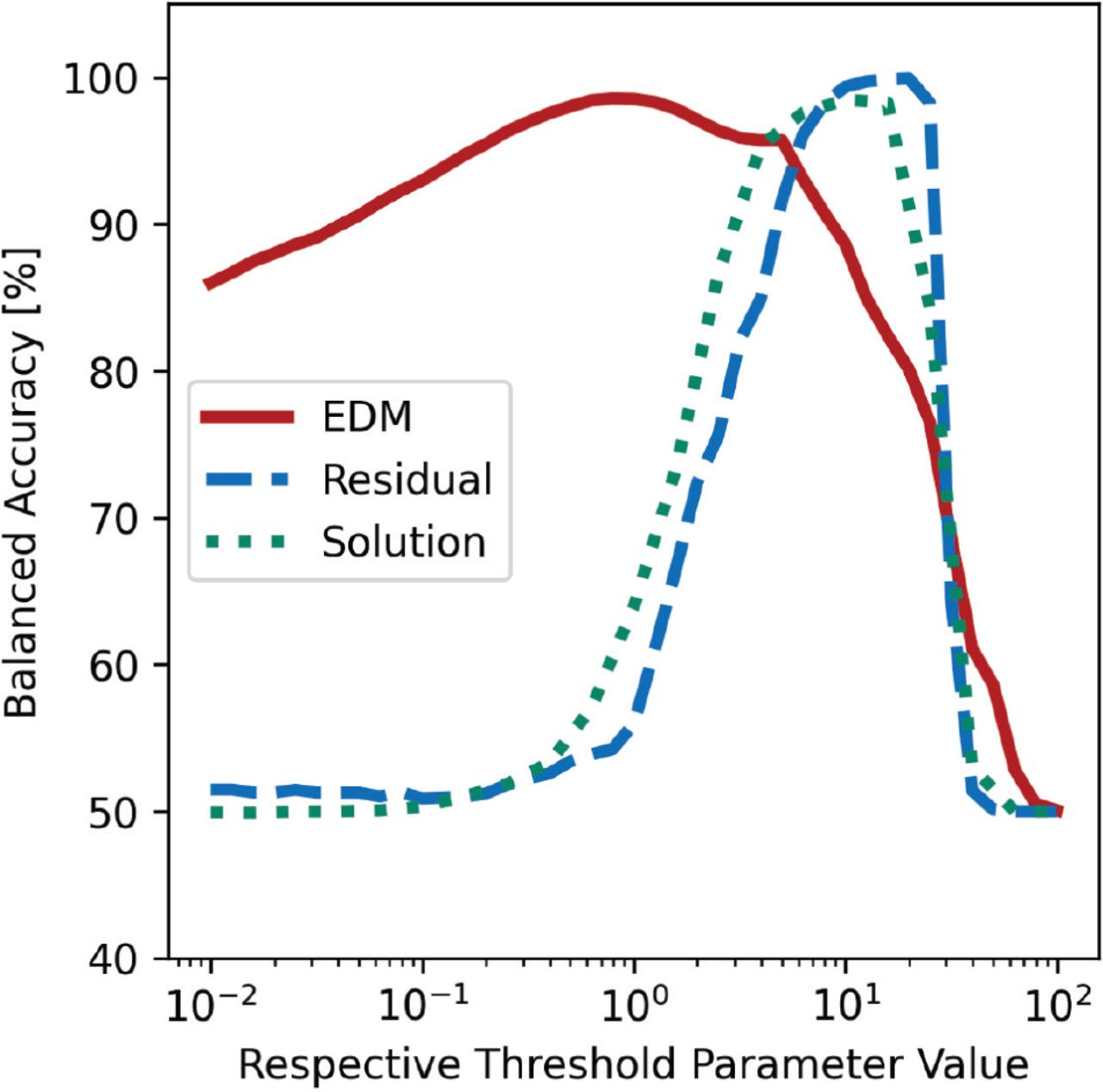
- FIGURE 7
The balanced accuracy (see Equation [9]) of each FDE method swept across a wide range of FDE thresholding parameters shows that EDM-based FDE is much more robust to changes in its thresholding parameter than the other two FDE methods.
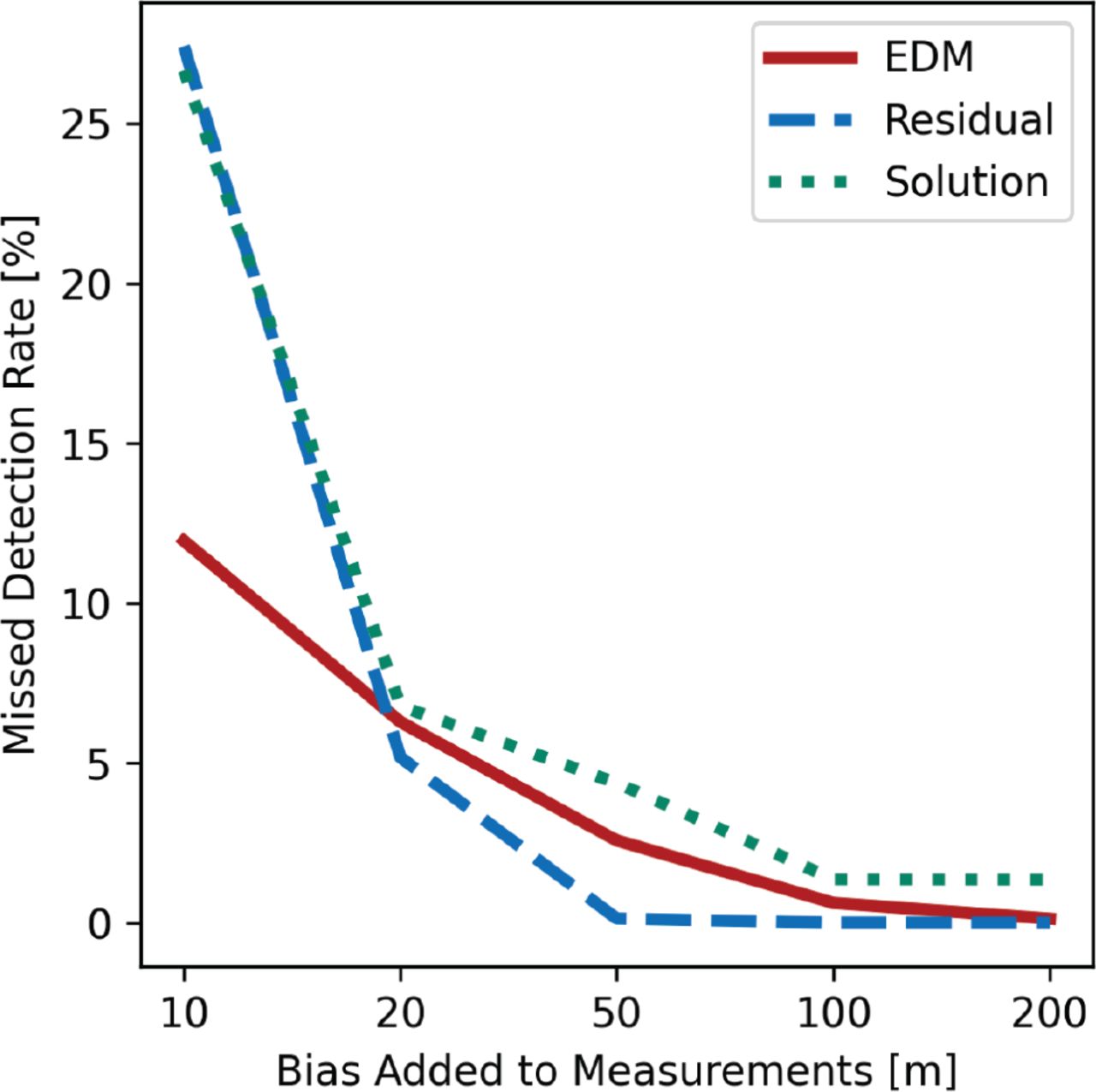
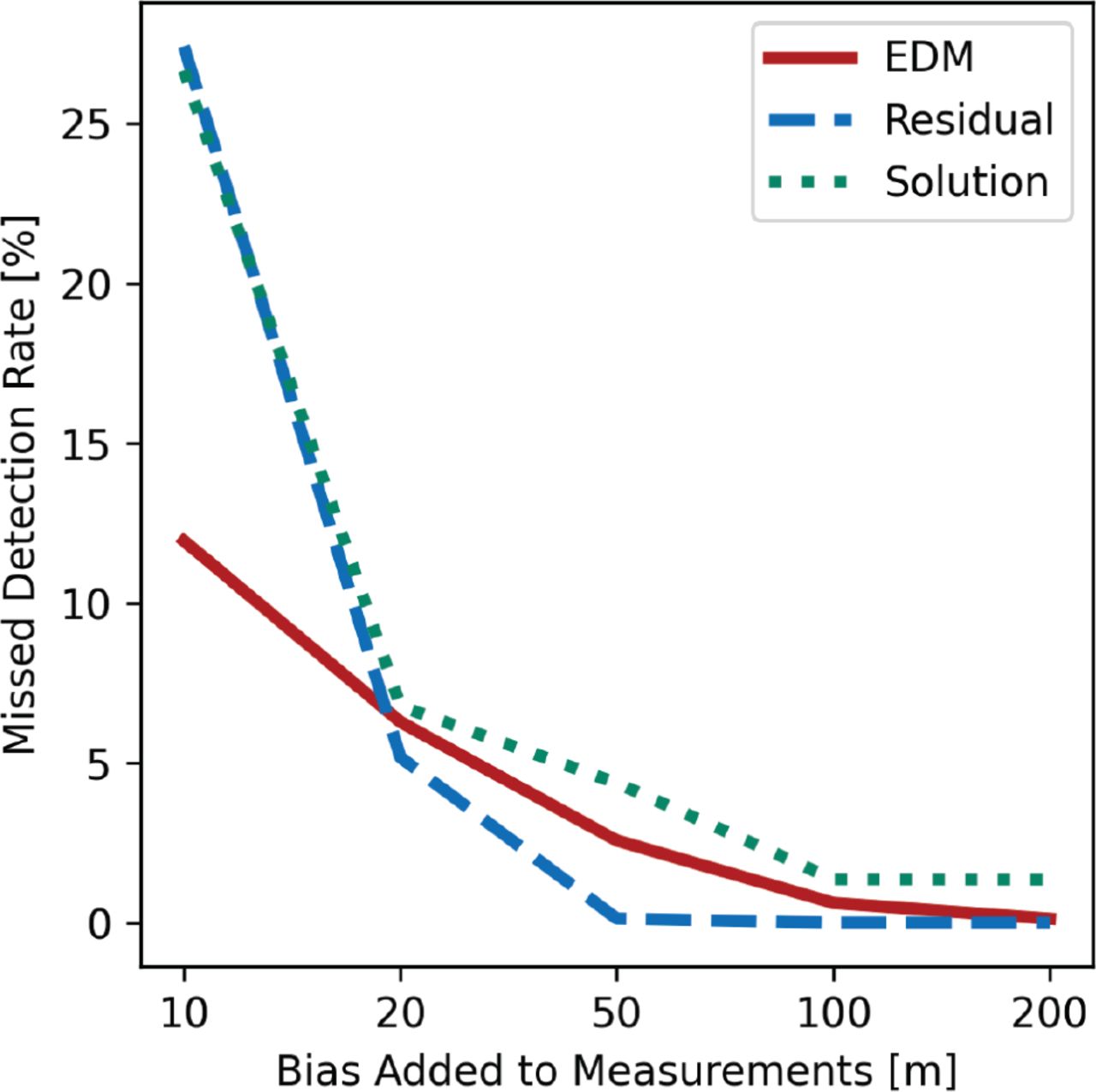
- FIGURE 8
Missed detection rate (see Equation [10]) with respect to the magnitude of the faults added
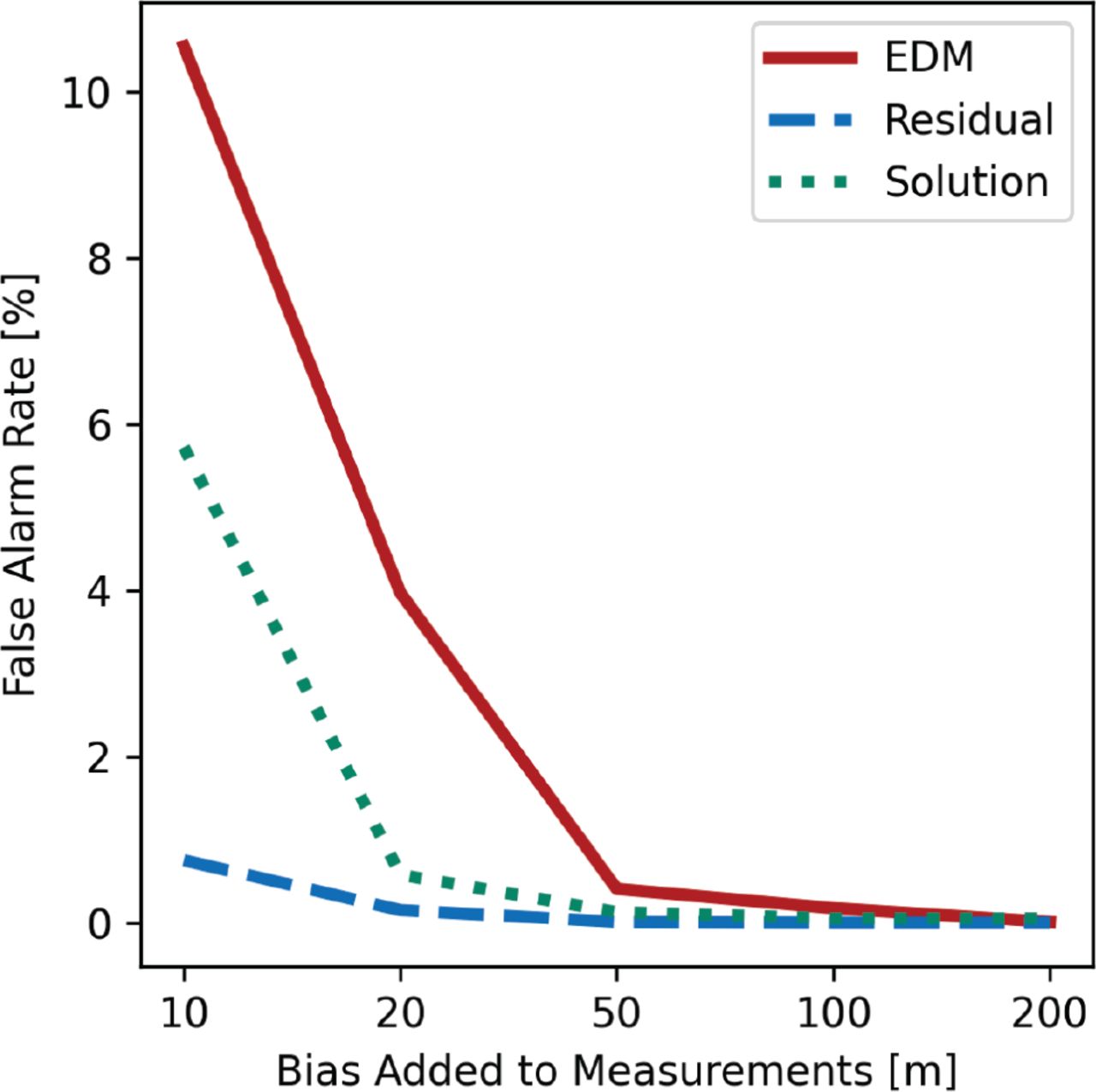
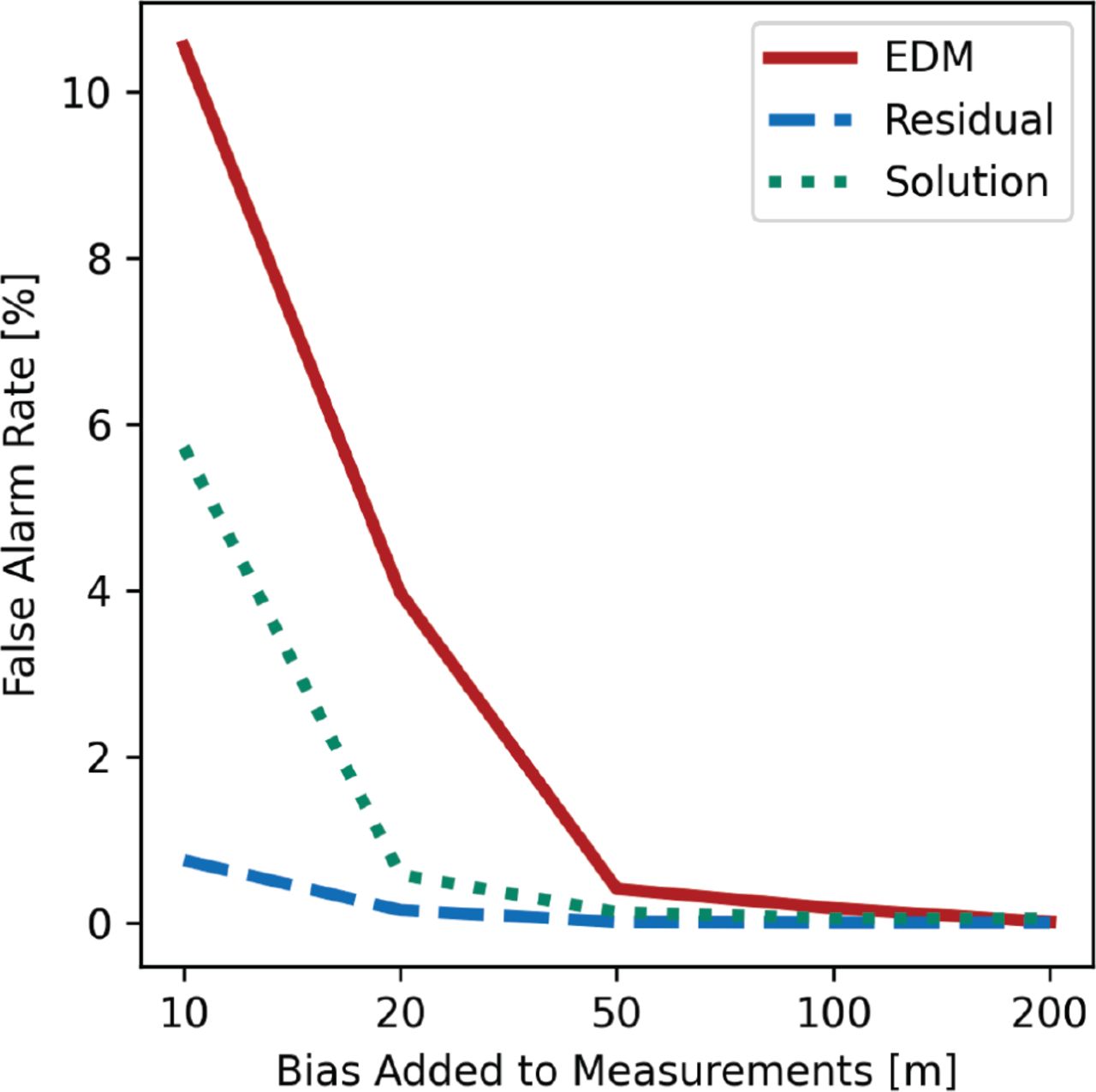
- FIGURE 9
False alarm rate (see Equation [11]) with respect to the magnitude of the faults added
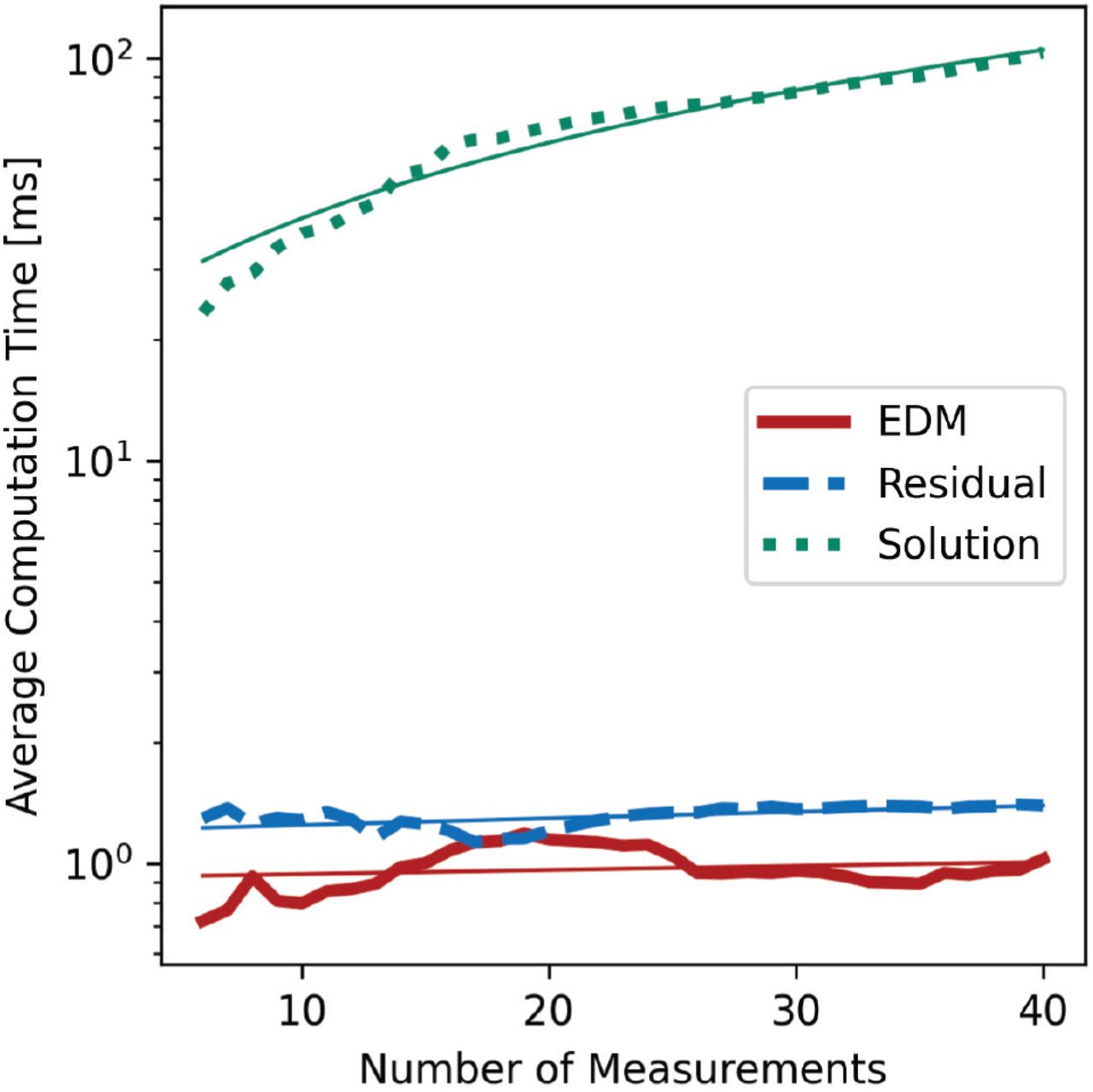
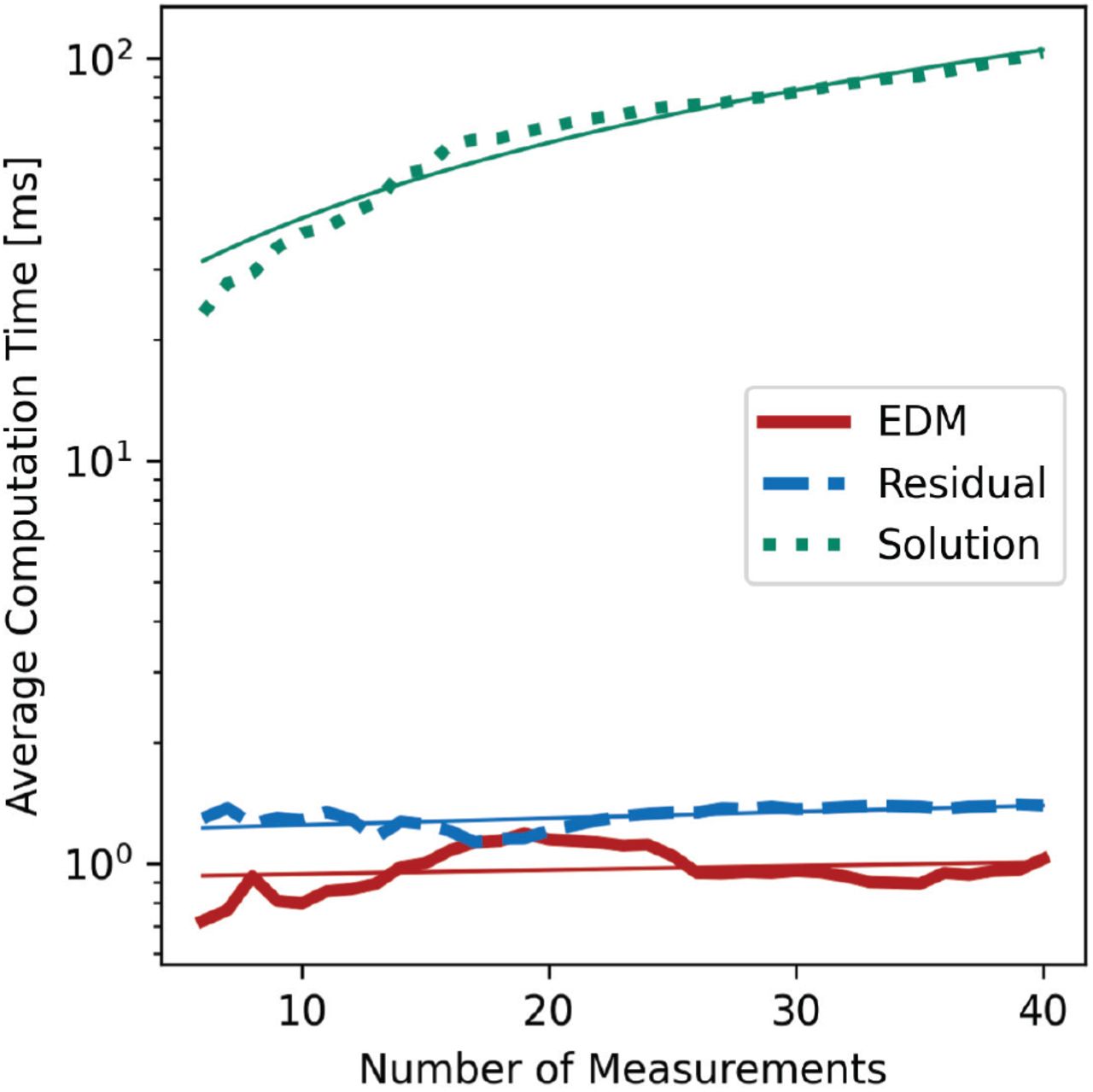
- FIGURE 10
Average computation time of each FDE method with increasing measurements in each measurement epoch; also shown is the best line fit for each FDE method.


Tables
- TABLE 1
Time Complexity of Solution Separation, Residual-Based, and EDM-Based Fault Detection and Exclusion
Solution Separation Residual-based EDM-based Fault Detection Fault Exclusion Note: m is the number of measurements in the measurement epoch and f is the number of faults hypothesized. All derivations for time complexity approximations included in Appendix A.
Solution Separation Residual-Based EDM-Based Balanced Accuracy % 84.9 88.7 91.6 Missed Detection Rate % 29.9 18.4 11.7 False Alarm Rate % 0.2 4.2 5.1











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Jump to section
Related Articles
Cited By...
- No citing articles found.